
어떤 분들이
수강하시면 좋을까요?
협동로봇 개발을 위한 다관절 로봇 티칭과 구현
다관절 로봇
협동로봇
협동로봇 개발을 위한 다관절 로봇 티칭과 구현
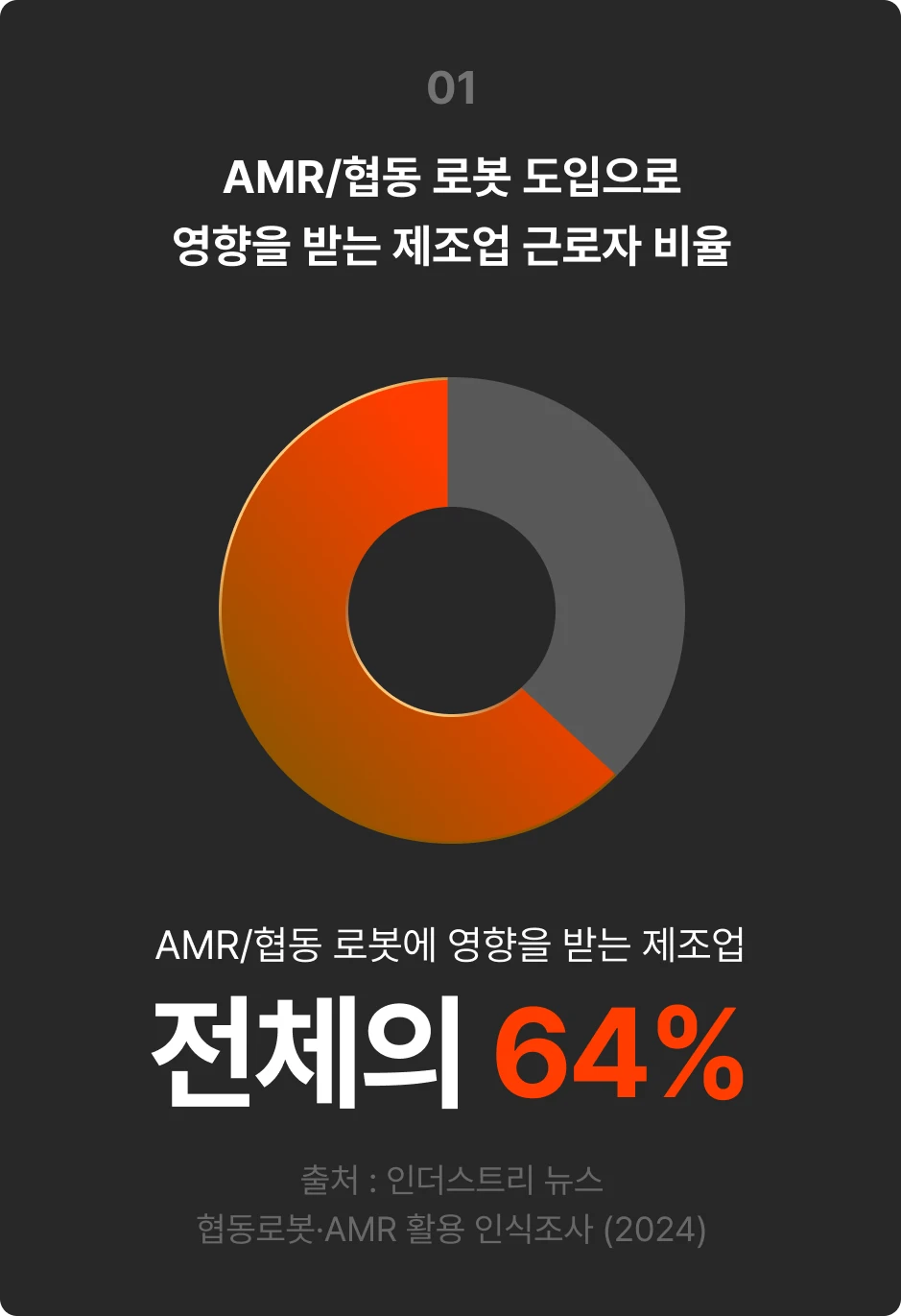
국/내외를 불문하고 발 빠르게 도입되는 산업용 로봇
특히 다관절/협동 로봇은 그 중심에 서 있습니다.

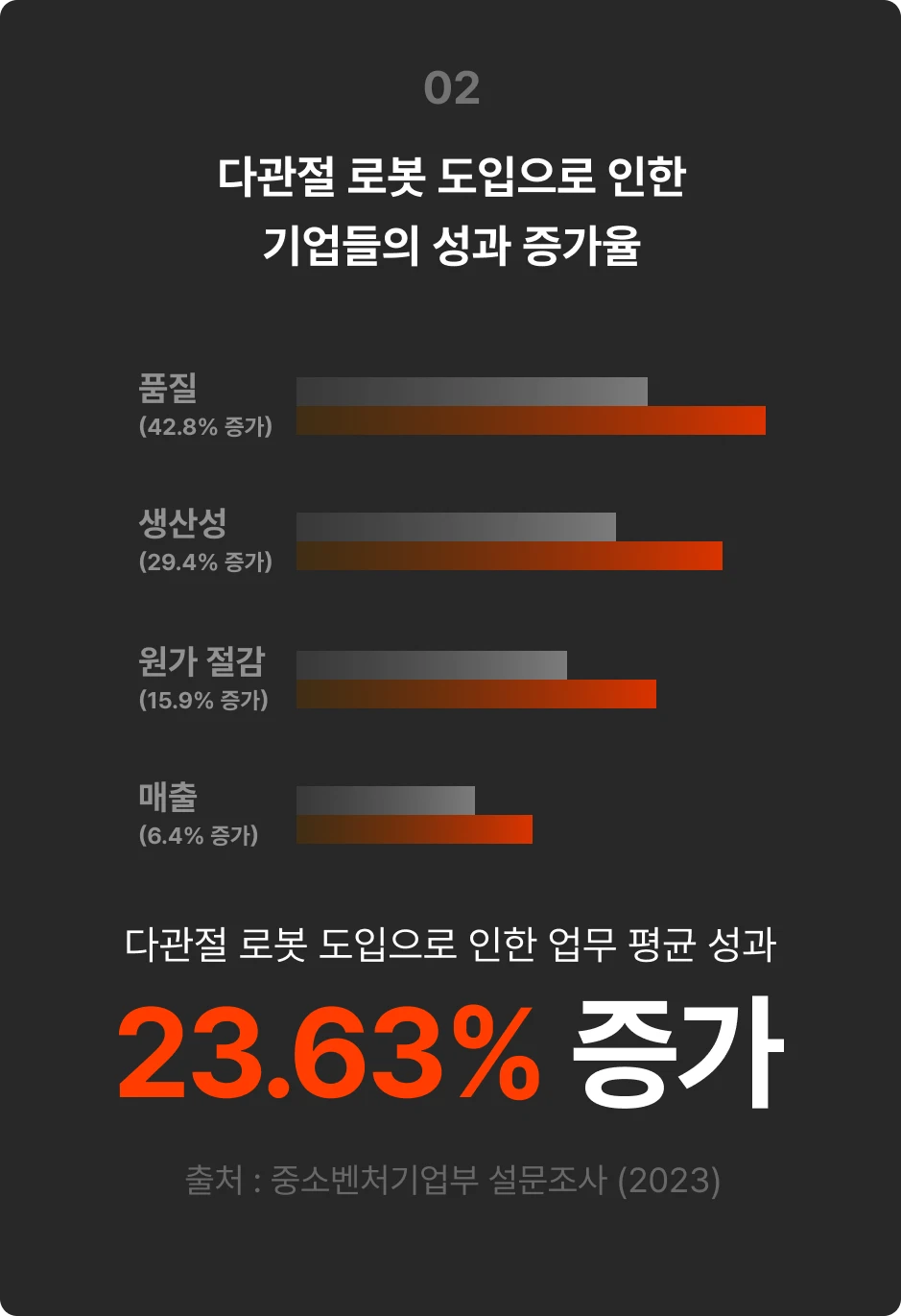
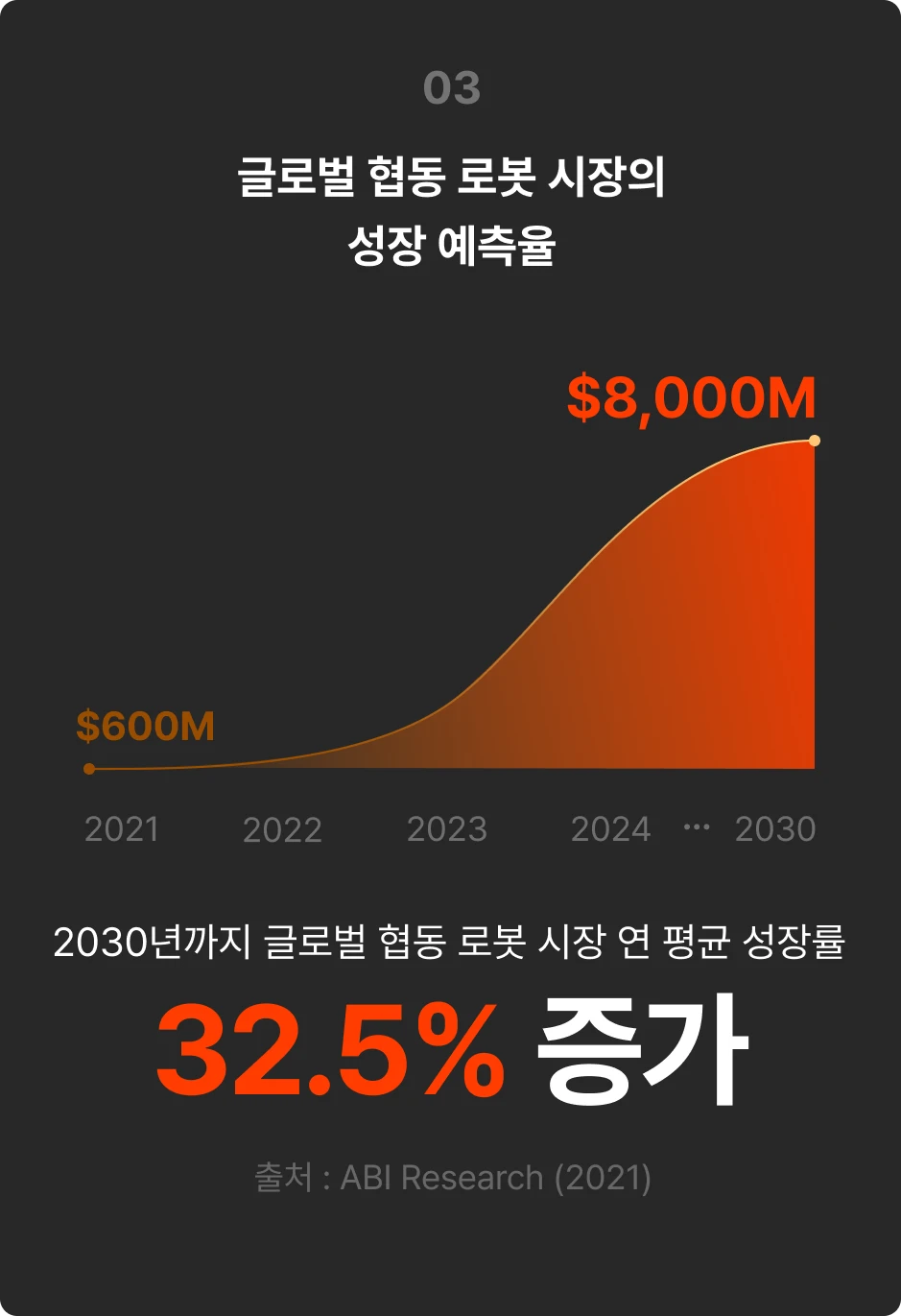
그렇다면 다관절/협동 로봇은 산업 현장에서
어떤 막대한 영향을 끼치고 있을까요?

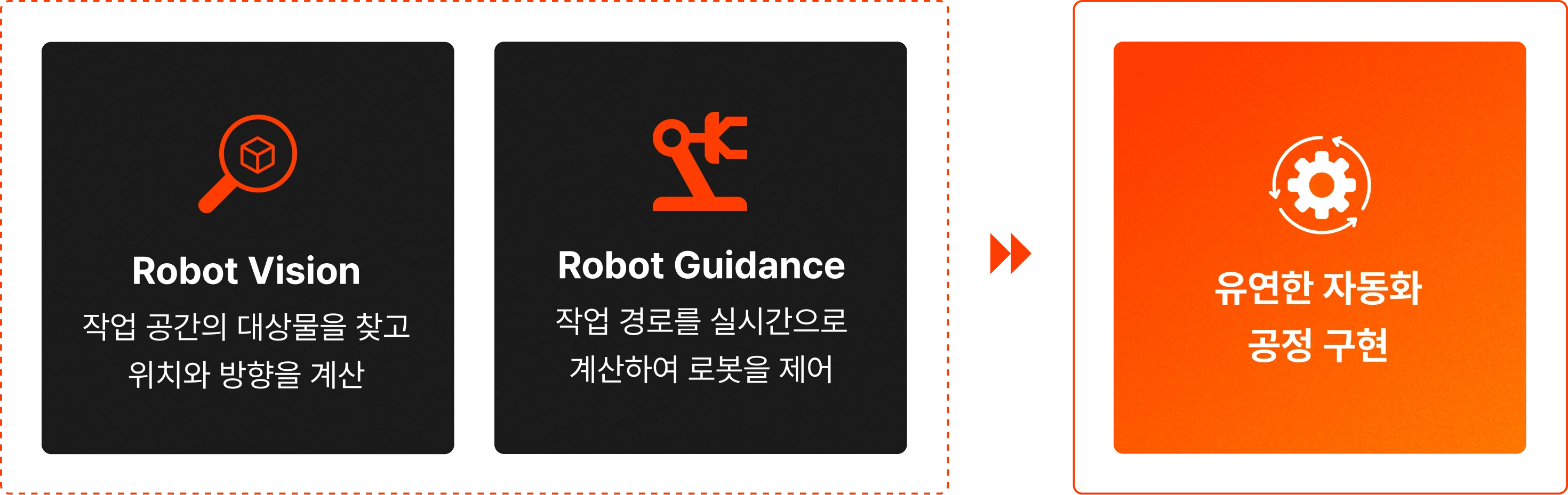
제조 생산 공정에서 다관절/협동 로봇의 기대 효과가 커지게 되면서
이를 유연하게 운용하기 위한 로봇 비전 기술이 점점 중요해지고 있습니다.

 로봇 비전 기술의 핵심적인 역할은?
로봇 비전 기술의 핵심적인 역할은?


로봇 공학 과 컴퓨터 비전부터
Coppeliasim, Palletizing & Depalletizing 까지
다관절 로봇을 개발하면서 필요한 모든 학습 내용을 담았습니다.


학습 포인트
다관절 로봇 구현에 필요한 로봇 공학과 컴퓨터 비전 기술부터
시뮬레이션을 활용한 협동 로봇 개발 구현까지 한 번에!

POINT 1
5가지 핵심 개념으로 시작하는 로봇 공학과 컴퓨터 비전
다관절 로봇이 실시간으로 주변 환경을 평가하고 움직임을 계산하기 위해
필요한 로봇 공학과 컴퓨터 비전 기술을 학습합니다.
핵심 개념 01
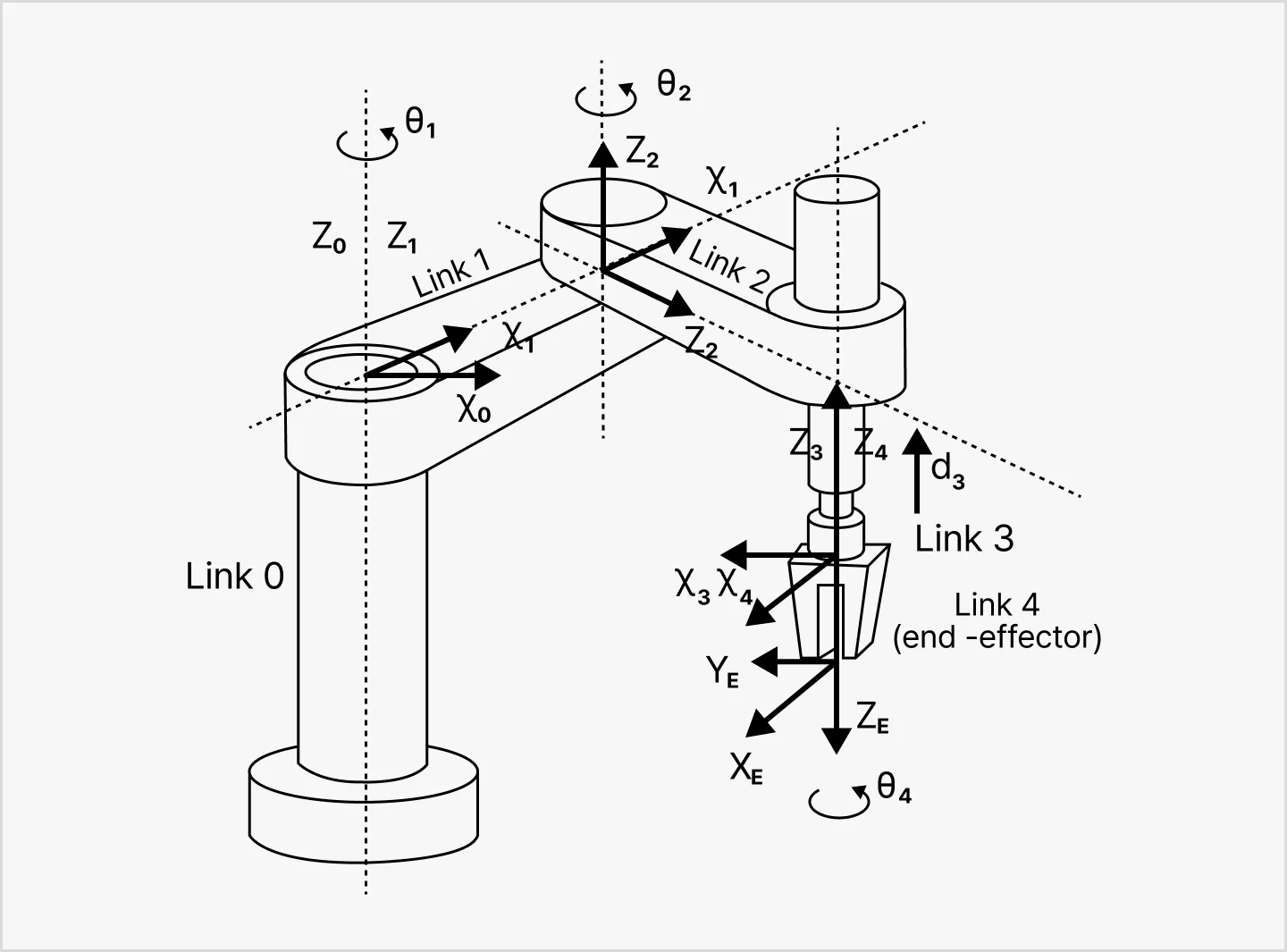
로봇 동작 제어를 위한 대표 4가지 구성요소 학습
다관절 로봇 동체의 움직임을 수행하기 위해 필요한 4가지 요소를 학습합니다.
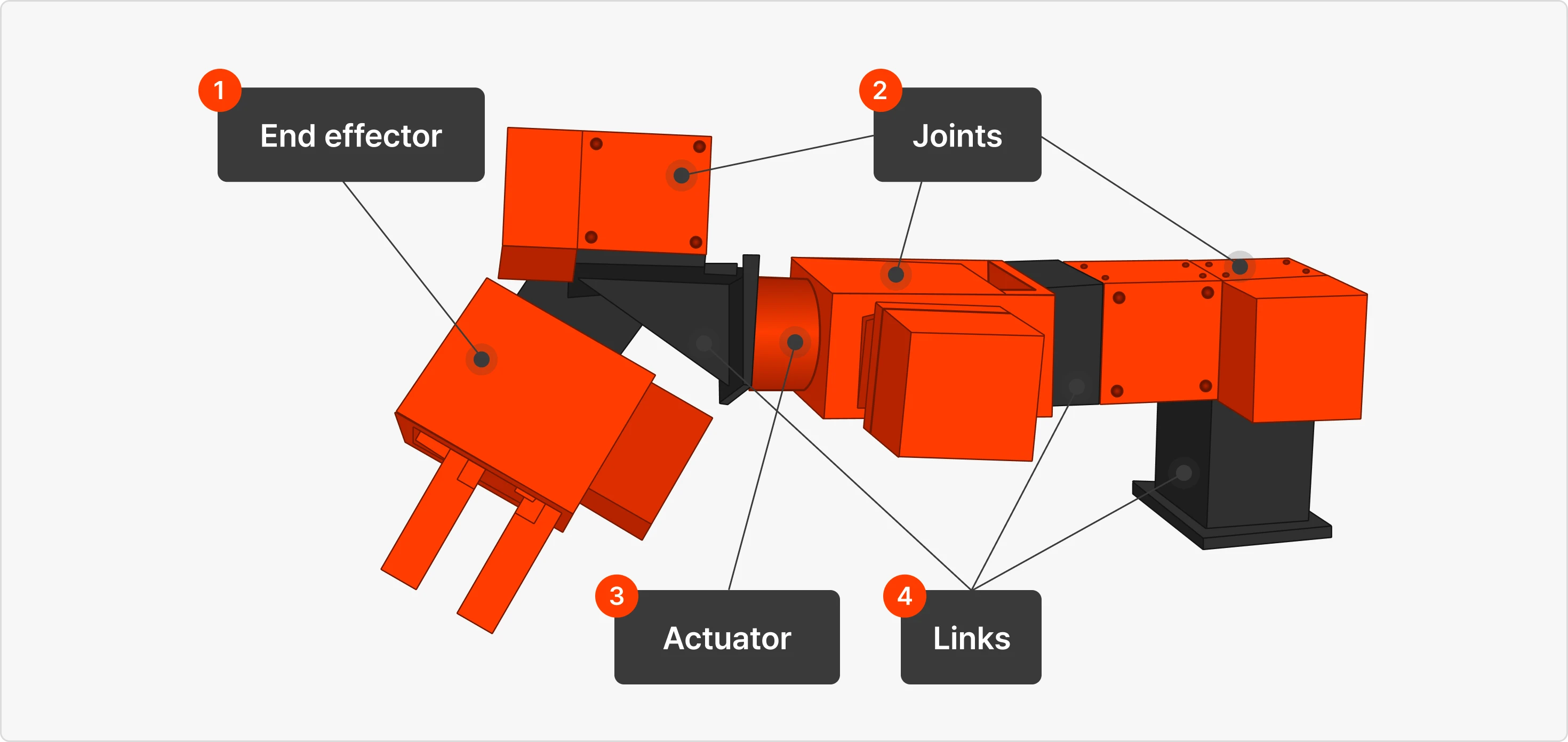
다관절 로봇의 가장 끝단에 위치한 작업 도구로 로봇이 작업 환경과 상호작용하여 요청된 Task를 수행할 수 있는 방법을 학습합니다.

로봇팔의 단위 모션(회전, 선형 이동)을 담당하는 요소로써 각 Link를 연결하여 로봇이 움직이는 원리를 학습합니다.
다관절 로봇의 관절을 움직임에 사용되는 전동모터로 주로 Joint 부근에 장착되며주어진 신호에 따라 동력을 낼 수 있는 원리를 학습합니다.

관절과 관절 사이 뼈대를 이루는 요소로써 로봇의 동작 역햑에 어떻게 영향을 미치게 되는지 학습합니다.
핵심 개념 02
로봇 동체의 움직임을 결정하는 모션 제어 방법 학습
다관절 로봇 동체의 움직임의 방향을 학습하기 위한 3가지 모션 제어 방법을 학습합니다.
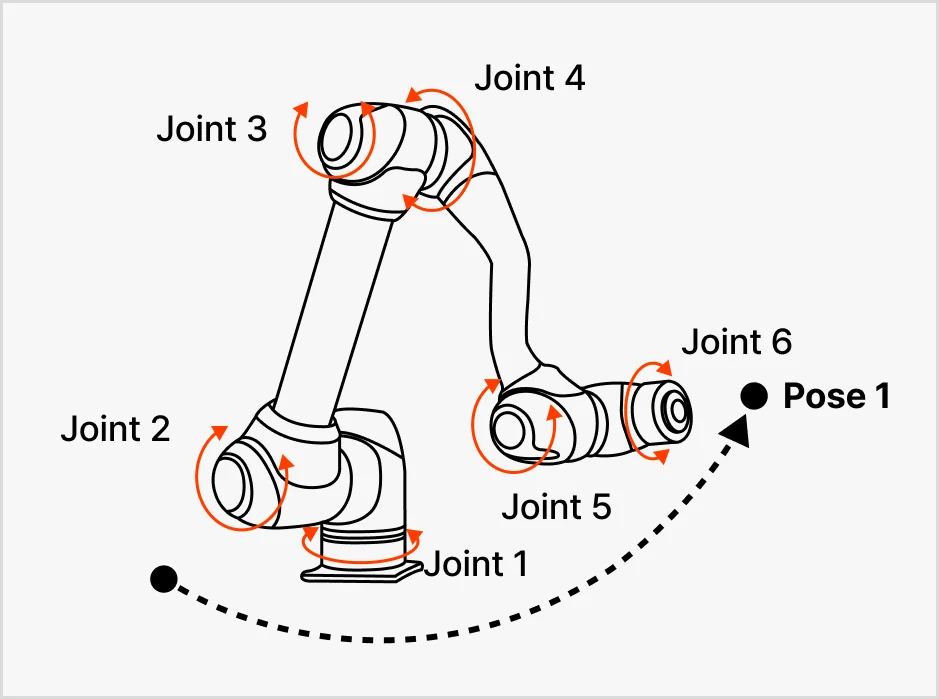
01. Move J(Joint Movement)
학습 내용
다관절 로봇이 각 관절 별 경로를 따라 이동하는 모션으로, 빠른 이동이 가능한 비선형 궤적 개념을 학습합니다.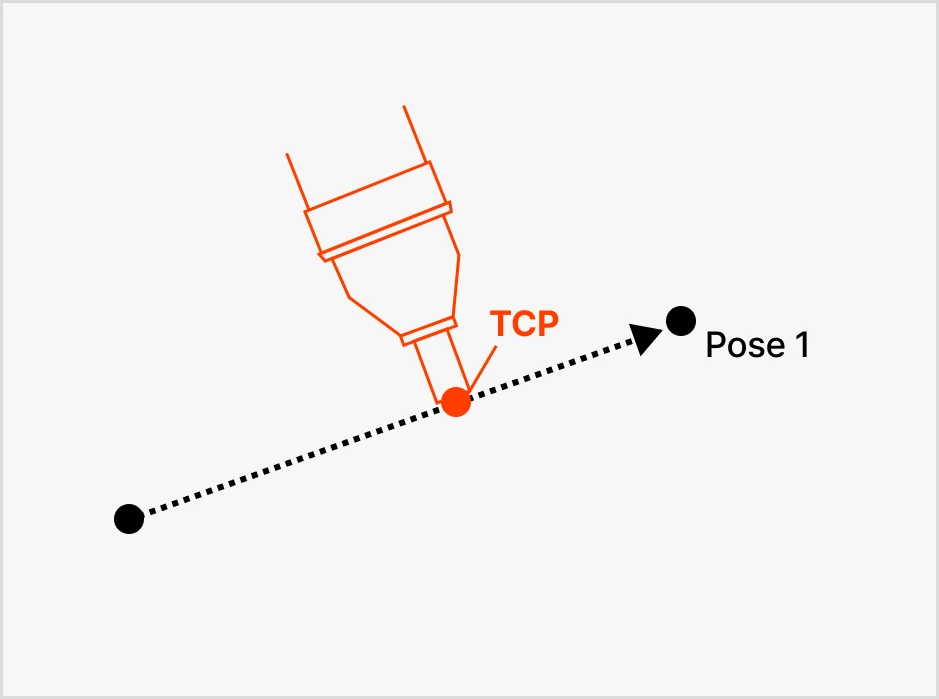
02. Move L(Linear Movement)
학습 내용
다관절 로봇이 End Effector 기준으로 직선 경로를 따라 이동하는 모션으로, 정확한 경로를 유지하는데 활용되는 모션 특징을 학습합니다.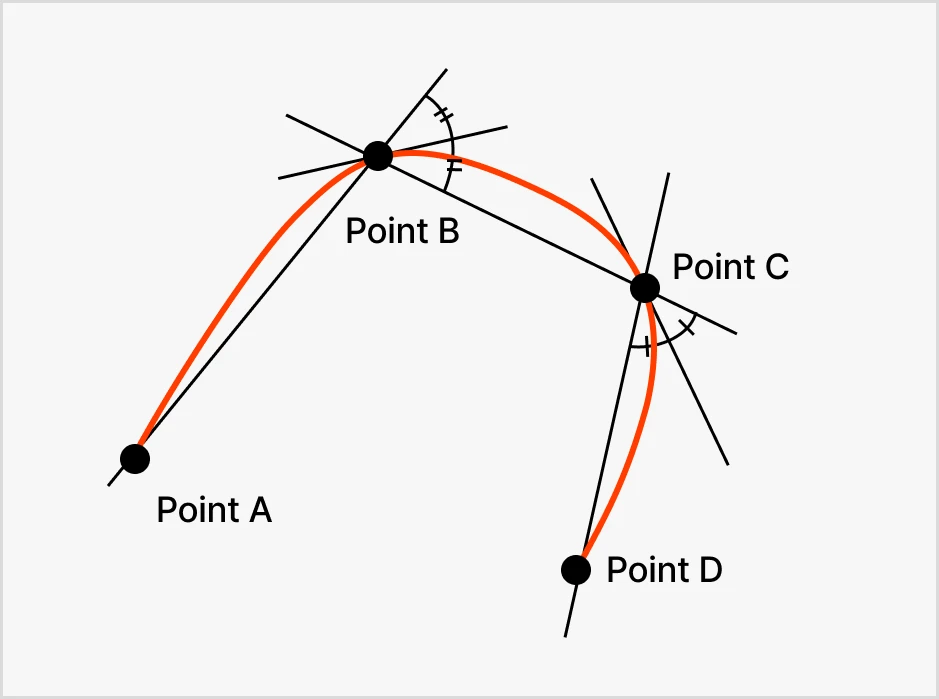
03. Spline Movement
학습 내용
여러 점을 통과하는 곡선형 경로를 생성하고 부드러운 움직임을 요구하는 과정에 적합한 모션 특징을 학습합니다.
핵심 개념 03
조인트 좌표계와 직교 좌표계
다관절 로봇의 위치와 동작을 정의하고 이해하기 위해 필수적으로 알아둬야 할 2가지 개념을 학습합니다.
조인트 좌표계
로봇의 각 관절(Joint) 상태를 기준으로 로봇의 위치를 표현하는 방식으로 로봇이 각 관절과 연결된 구동기를 제어하는 방법을 학습합니다.
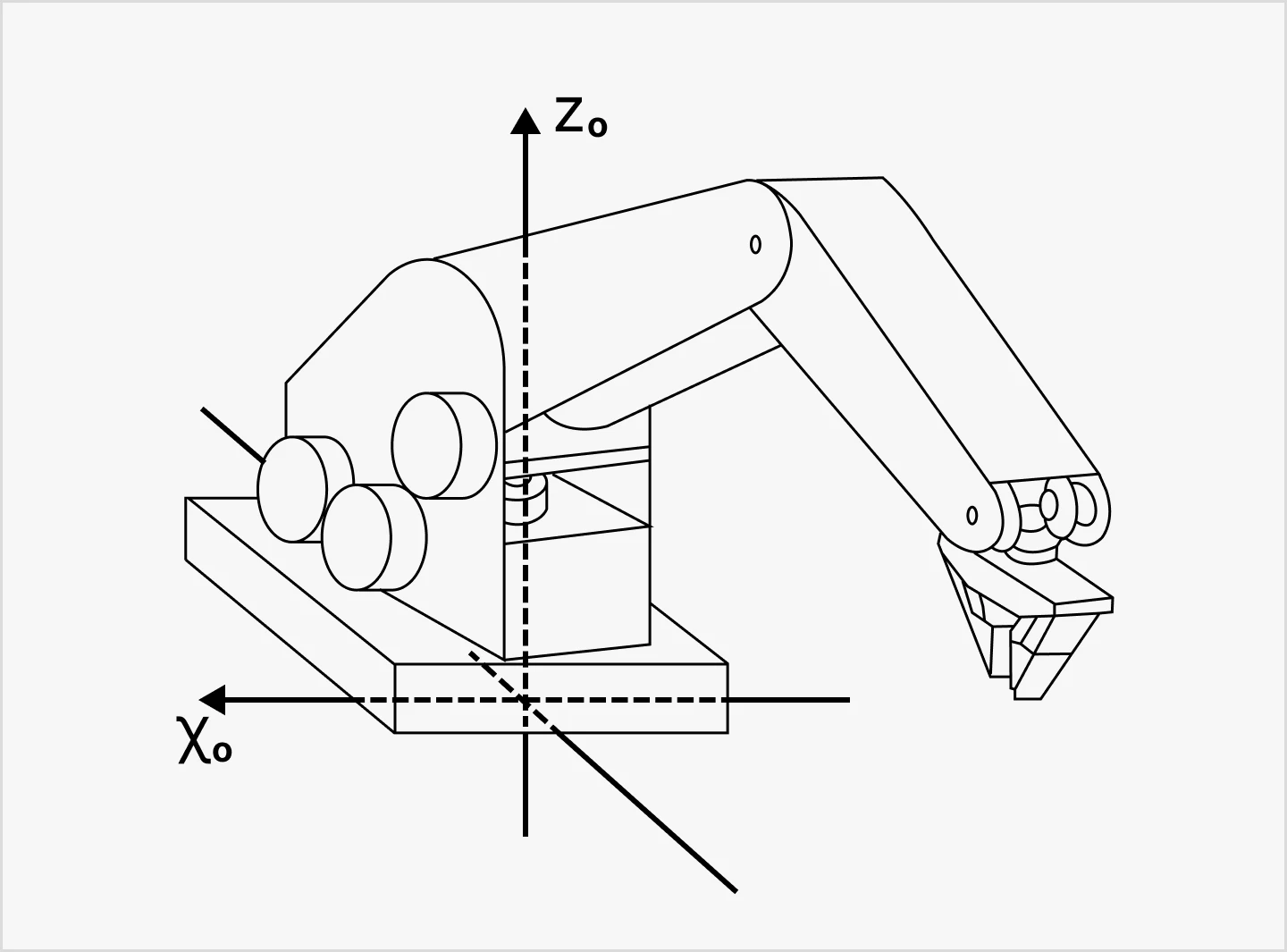
직교 좌표계
로봇의 End Effector의 위치와 자세를 직교 공간으로 표현하는 방식으로 특정 좌표에서 로봇을 제어하는 방법을 학습합니다.


잠깐!
로봇이 자유자재로 움직일 수 있게 하려면
좌표 변환에 대해서도 알아야 하나요?
핵심 개념 04
정기구학(Forward Kinematics)과 역기구학(Inverse Kinematics)
다관절 로봇의 End Effector(로봇 팔 끝단)를 원하는 작업에 따라 이동하기 위해 필요한 2가지 관절각을 제어하는 방법을 학습합니다.
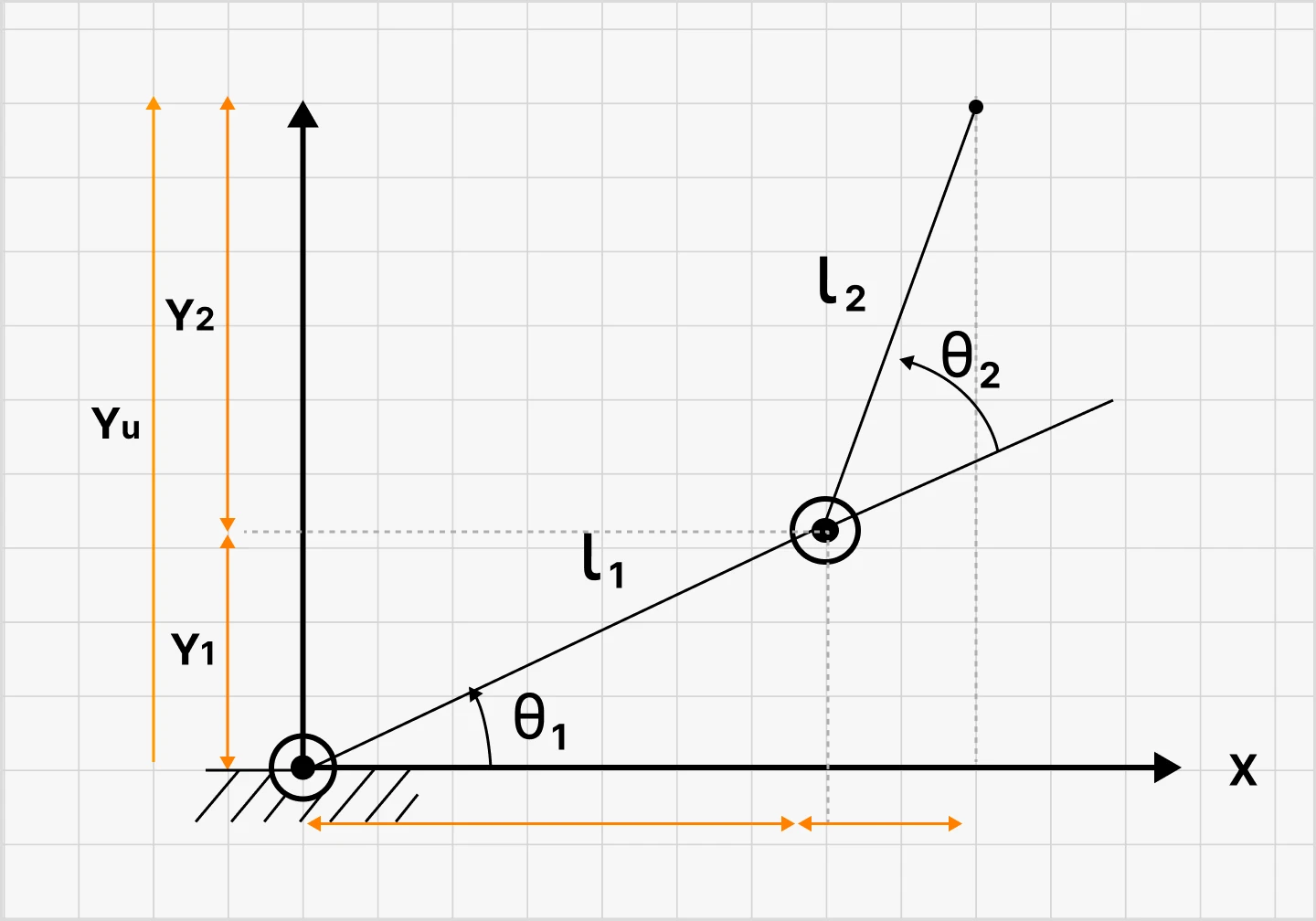
정기구학
Link와 Joint의 각도 & 길이로부터
End Effector의 위치와 각도를 알아내는 방법
Link와 Joint의 각도 & 길이로부터
End Effector의 위치와 각도를 알아내는 방법
∙ 다관절 로봇의 시뮬레이션과 경로 계획을 짜는 방법 학습
∙ DH 파라미터를 활용 로봇 팔 모델링과 변환 행렬을 계산
∙ 변환 행력을 누적 곱 하였을 때, End Effector의 위치와 자세 계산
∙ DH 파라미터를 활용 로봇 팔 모델링과 변환 행렬을 계산
∙ 변환 행력을 누적 곱 하였을 때, End Effector의 위치와 자세 계산
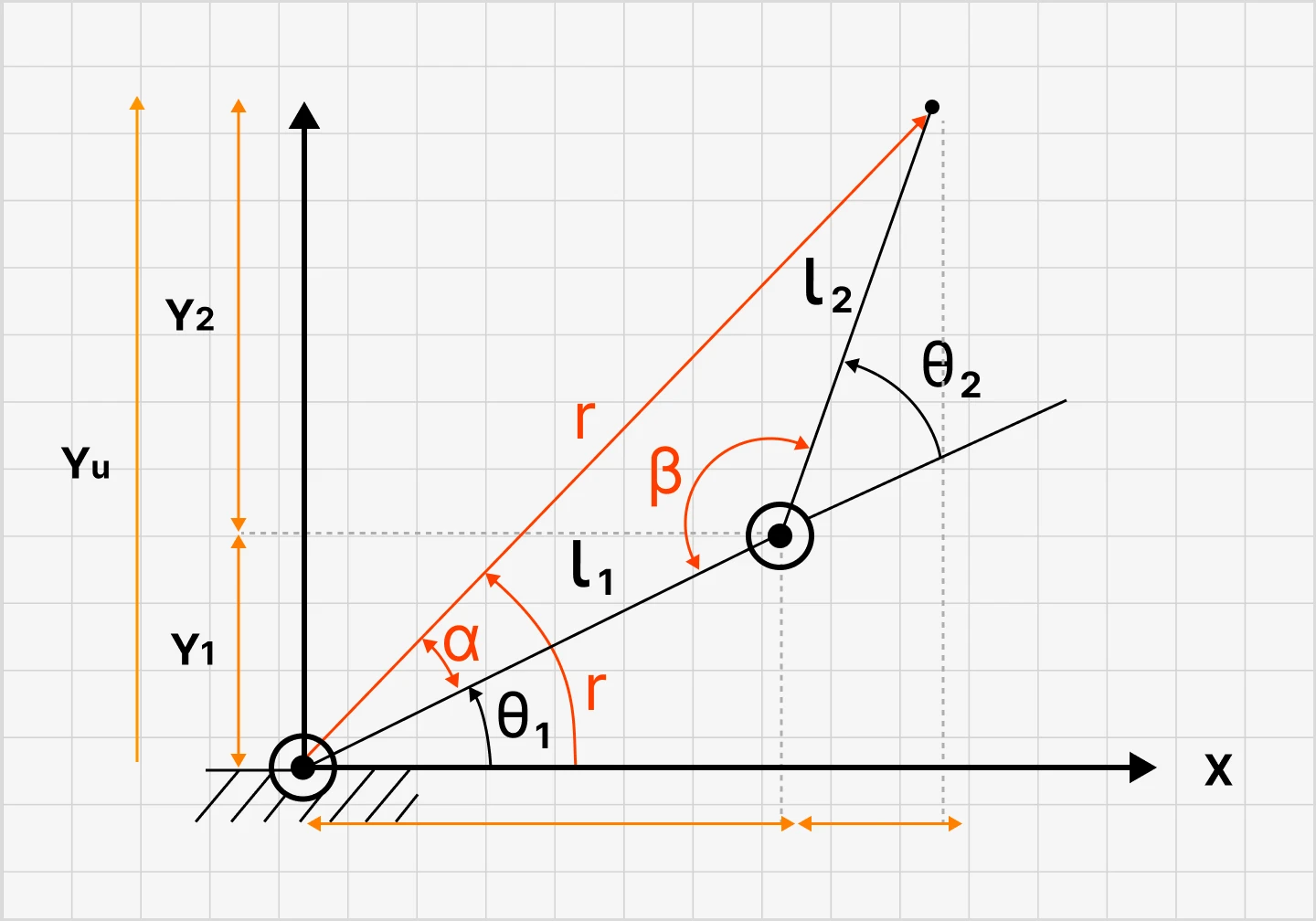
역기구학
로봇의 End Effector가 작업하고자 하는 위치와 방향을 입력으로,
움직여야 하는 관절 각도를 계산하는 방법
로봇의 End Effector가 작업하고자 하는 위치와 방향을 입력으로,
움직여야 하는 관절 각도를 계산하는 방법
∙ 목표 위치가 주어졌을 때 역기구학을 계산하는 방법 학습
∙ 수치 해석법을 활용하여 역기구학의 알고리즘을 적용하는 방법
∙ 주어진 직교 좌표계의 위치로, Joint 자세를 계산
∙ 수치 해석법을 활용하여 역기구학의 알고리즘을 적용하는 방법
∙ 주어진 직교 좌표계의 위치로, Joint 자세를 계산
핵심 개념 05
OpenCV를 활용하여 로봇 비전 시스템 구현 방법 학습
다관절 로봇이 작업 공간에 있는 대상물을 찾고 위치와 방향을 계산할 수 있는 컴퓨터 비전 기술을 학습합니다.

1) 다관절 로봇이 작업을 처리하기 위한 과정에서
대상을 인식하기 위해 필요한 이미지의
기본 3요소를 학습합니다.
∙ OpenCV 설정 방법 학습
∙ 이미지 탐색 및 정합 방법 학습
∙ OpenCV를 활용한 객체 매칭 실습

1) 다관절 로봇이 카메라로 상황을 인식하는 기능을
개발할 수 있는 OpenCV 활용 방법을 학습합니다.
∙ OpenCV 설정 방법 학습
∙ 이미지 탐색 및 정합 방법 학습
∙ OpenCV를 활용한 객체 매칭 실습
1) 다관절 로봇이 다양한 환경(조명, 색상, 변화 등)에서
안정적으로 작동할 수 있는 컴퓨터 비전 시스템
개발 실습을 진행합니다.
∙ 그레이 스케일 변환 실습
∙ 노이즈 제거 실습
∙ 엣지 검출 실습
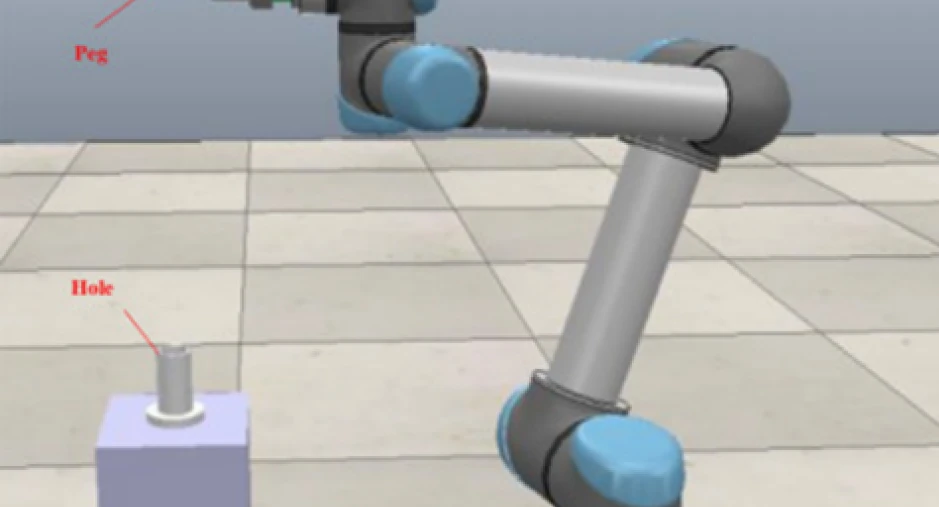
POINT 2
CoppeliaSim 시뮬레이터로 다관절 로봇 구동 방법 학습
CopeliaSim 시뮬레이터를 활용하여 내장된 여러 협동 로봇 모델들을 학습하고
컴퓨터 비전과 통합하여 로봇을 동작하는 방법을 학습합니다.
No 01.
다관절 로봇을 개발하기 전 성능 테스트 시 CoppeliaSim을 가장 많이 활용하는 3가지 이유 학습
산업 현장에서 로봇 성능을 평가하기 전 활용되는 시뮬레이터로 CoppeliaSim을 가장 많이 선택하는 이유에 대해 알아봅니다.
No 02.
협동 로봇 개발에서 대표적으로 쓰이는 3가지 로봇 모델 학습
로봇 환경 세팅부터 시뮬레이션 환경에 대한 이해, 로봇 종류 벌 센서 및 카메라 등 활용 가능한 자원을 학습합니다.
수직 다관절 로봇
여러 개의 회전 관절(로터리 조인트)를 가지고 있는 로봇으로 용접, 적재/적하, 페인팅, 픽엔플레이스 작업에 주로 활용됩니다.
협동 로봇
사람이 근처에서 안전하게 작업할 수 있게 설계된
로봇으로 유연한 관절 구조와 안전 센서를 장착하여 사람과의 협동 작업 수행을 진행합니다.
산업용 로봇
고속, 고정밀 작업을 위해 설계되는 로봇으로 크고 무거운 물체를 다룰 수 있는 견고한 구조로 반복 작업을 수행하는 데 활용됩니다.

CoppeliaSim 시뮬레이터의 사용법과 각 내장된 로봇들의 기능들을 학습하였다면,
이를 활용한 다관절 로봇 모션 구현 실습을 진행합니다.
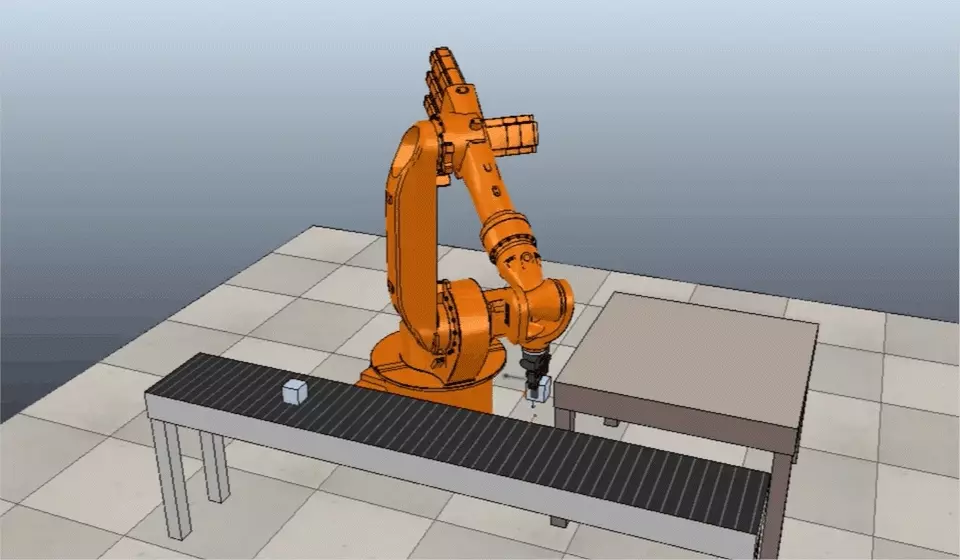
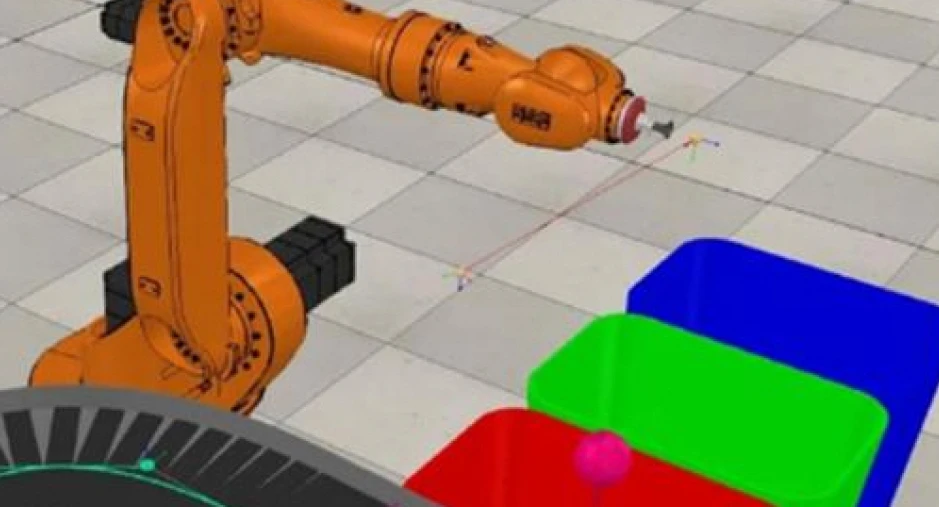
Middle Proejct 1.
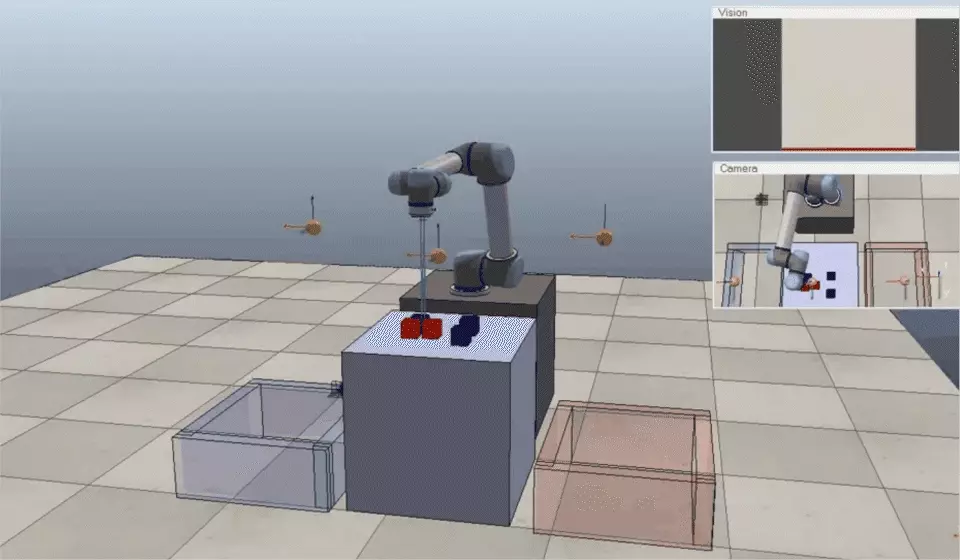
CoppeliaSim 시뮬레이터 환경에서 6측 다관절 로봇을 활용한
Pick & Place 프로젝트 구현
CoppeliaSim 시뮬레이터 환경에서 6측 다관절 로봇을 활용한
Pick & Place 프로젝트 구현
작업 공간 내에서 자유도가 가장 높은 6측 다관절 로봇을 활용하여 다관절 로봇의 가장 기본 작업인 사물의 적재와 이송 실습을 구현합니다.
No 03.
로봇 모션과 컴퓨터 비전을 활용한 다관절 로봇 제어 방법 학습
로봇의 주요 명령어 구현부터 2D/3D 컴퓨터 비전을 활용하여 로봇을 제어하는 방법을 학습합니다.
Middle Proejct 2.
로봇 모션 API를 활용한 로봇 동작 구현
로봇 모션 API를 활용한 로봇 동작 구현
∙ 로봇 모션 API를 활용하여 동작 제어와 모션 명령어 구현 방법 학습
∙ (실습) Move J, Move L, End-Effector 동작 API로 로봇 동작 구현
∙ (실습) Move J, Move L, End-Effector 동작 API로 로봇 동작 구현
Middle Proejct 3.
카메라 데이터 출력을 위한 로봇-카메라 켈리브레이션
카메라 데이터 출력을 위한 로봇-카메라 켈리브레이션
∙ OpenCV에서 이미지 데이처 취득과 로봇-카메라 간 좌표계 설정 방법 학습
∙ (실습) 이미지 및 영상 스트림을 위한 로봇-카메라 켈리브레이션 구현
∙ (실습) 이미지 및 영상 스트림을 위한 로봇-카메라 켈리브레이션 구현
Middle Proejct 4.
2D 컴퓨터 비전을 활용한 객체 인식 기반 Pick & Place 구현
2D 컴퓨터 비전을 활용한 객체 인식 기반 Pick & Place 구현
∙ 2D 컴퓨터 비전 데이터를 활용하여 객체 인식 & 위치 검출 방법 학습
∙ (실습) 로봇 좌표계 상의 객체 위치를 계산하여 Pick & Place 작업 구현
∙ (실습) 로봇 좌표계 상의 객체 위치를 계산하여 Pick & Place 작업 구현
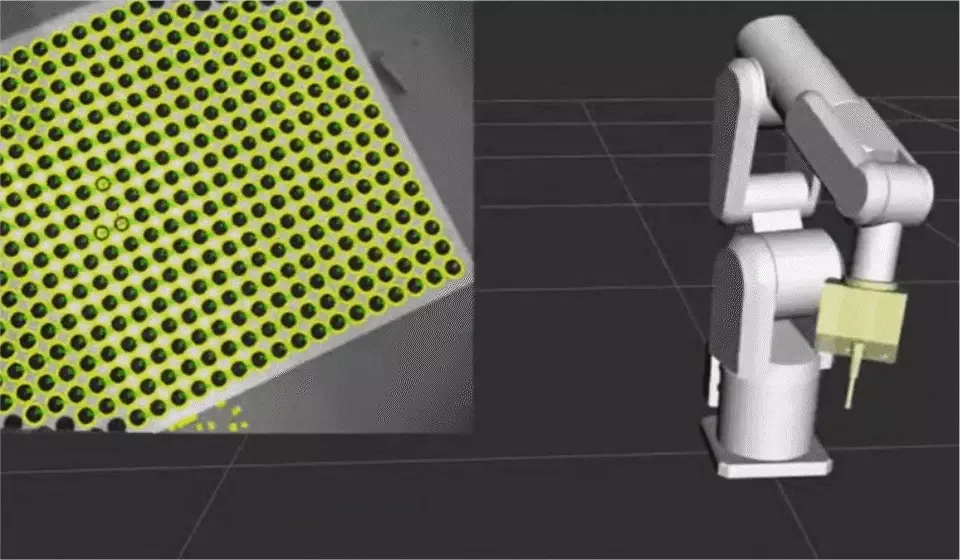
Middle Proejct 5.
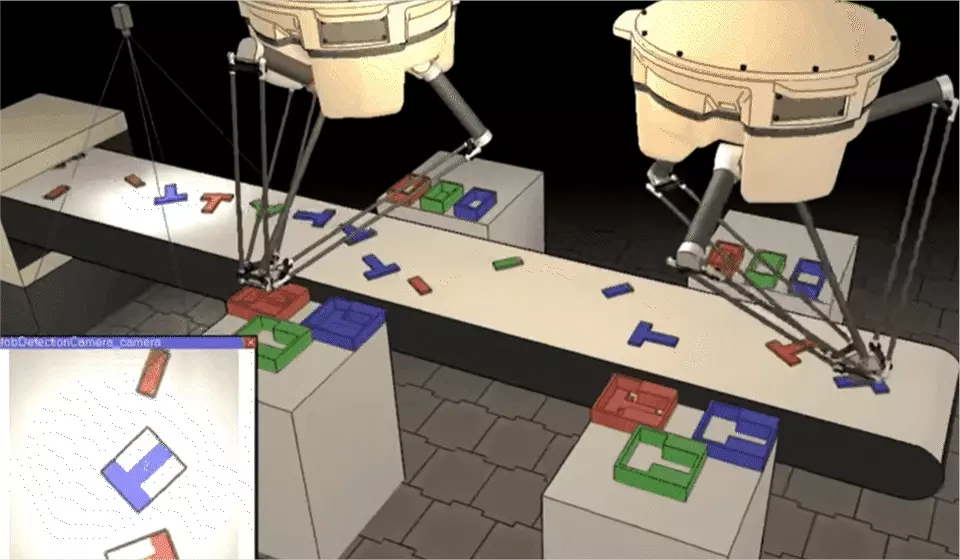
딥러닝 & 3D 컴퓨터 비전을 활용한 Pick & Place 구현
딥러닝 & 3D 컴퓨터 비전을 활용한 Pick & Place 구현
∙ 3D 컴퓨터 비전 환경에서 객체 분류 & 인식과 대상물 위치 검출 방법 학습
∙ (실습) 3종 이상의 객체를 각각 구분하여 Pick & Place 작업 구현
∙ (실습) 3종 이상의 객체를 각각 구분하여 Pick & Place 작업 구현
POINT 3
전 산업군에서 주목하는 2가지 다관절 로봇 구현 프로젝트
스마트팩토리, 물류, 유통, 제조 등 실무 전방위 분야에서 바로 적용 가능한
대표 2가지 실습 프로젝트를 직접 구현합니다.
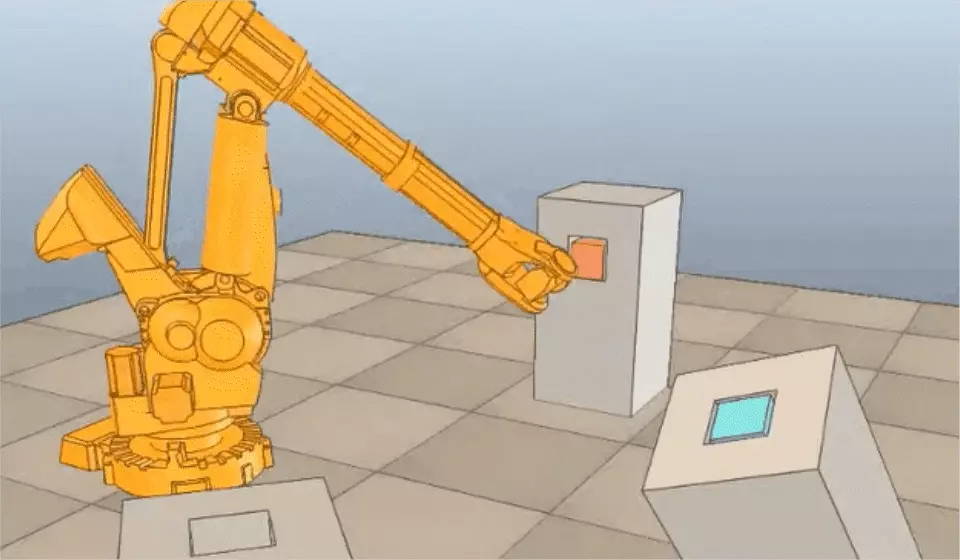
Final Project 01
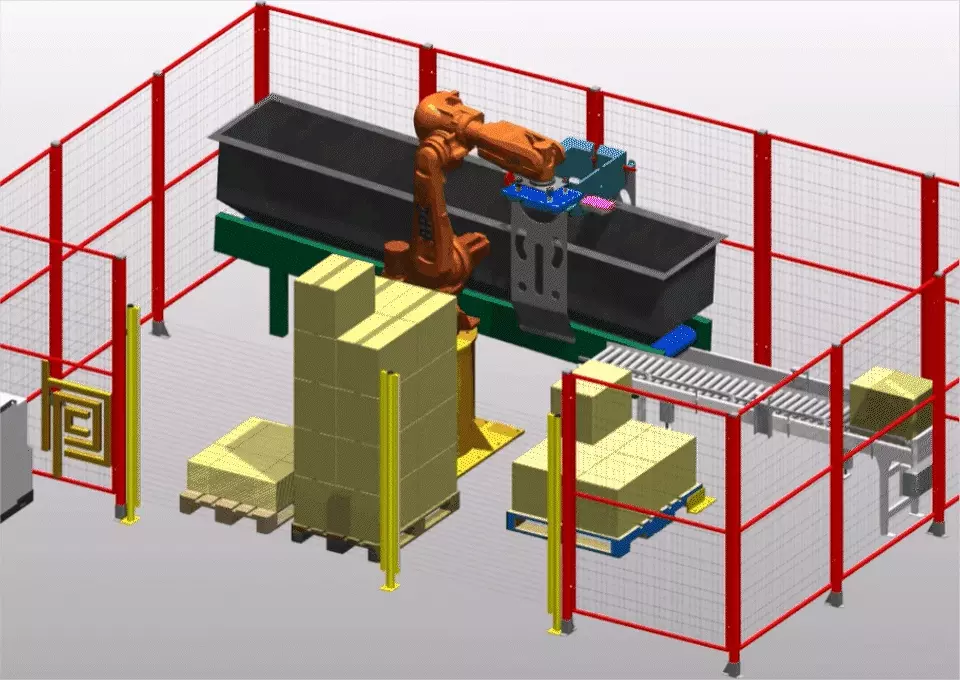
박스 디팔레타이징(Depalletizing) 로봇 구현 프로젝트
팔레트 위의 혼합 적재된 박스를 탐색하고, 로봇의 궤적을 계획하여 Depalletizing 작업을 수행하는 방법을 학습합니다.
학습 포인트
∙ Palletizing & Depalletizing 작업의 개념과 필요성을 학습합니다.
∙ 다양한 작업 환경에서 로봇이 적재된 박스를 안정적으로 인식 및
궤적을 계획할 수 있도록 설계하는 방법을 학습합니다.
∙ 혼합 팔레트 모델을 구성하고 박스 매치 및 로봇 배치를 설계해서
로봇이 박스 위치를 보정하면서 궤적을 생성하는 알고리즘 개발 방법을 학습합니다.
주요 구현 기능
∙ Object Detetion & Locallization (박스 탐색 및 위치 인식)
∙ Motion Planning (경로 계획)
∙ Depalletizing Task Planning (디팔레타이징 작업 구현)
∙ Palletizing & Depalletizing 작업의 개념과 필요성을 학습합니다.
∙ 다양한 작업 환경에서 로봇이 적재된 박스를 안정적으로 인식 및
궤적을 계획할 수 있도록 설계하는 방법을 학습합니다.
∙ 혼합 팔레트 모델을 구성하고 박스 매치 및 로봇 배치를 설계해서
로봇이 박스 위치를 보정하면서 궤적을 생성하는 알고리즘 개발 방법을 학습합니다.
주요 구현 기능
∙ Object Detetion & Locallization (박스 탐색 및 위치 인식)
∙ Motion Planning (경로 계획)
∙ Depalletizing Task Planning (디팔레타이징 작업 구현)
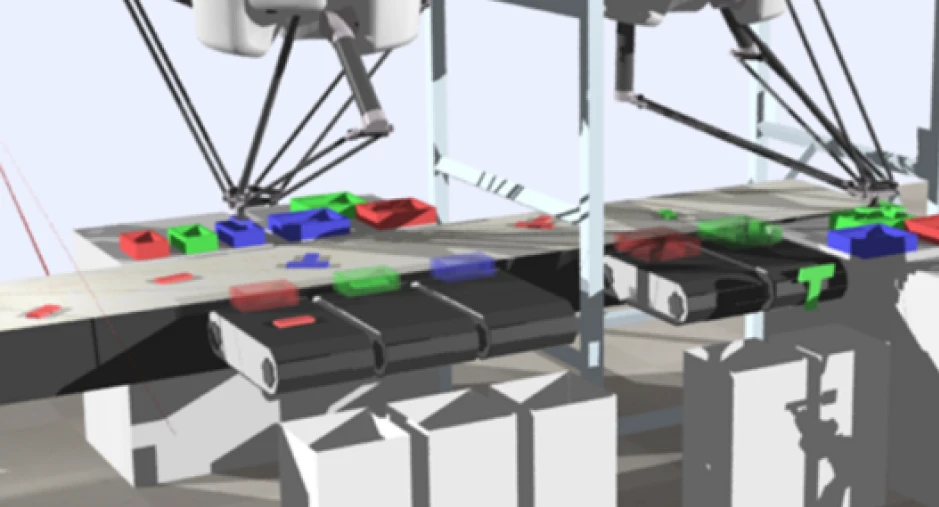
Final Project 02
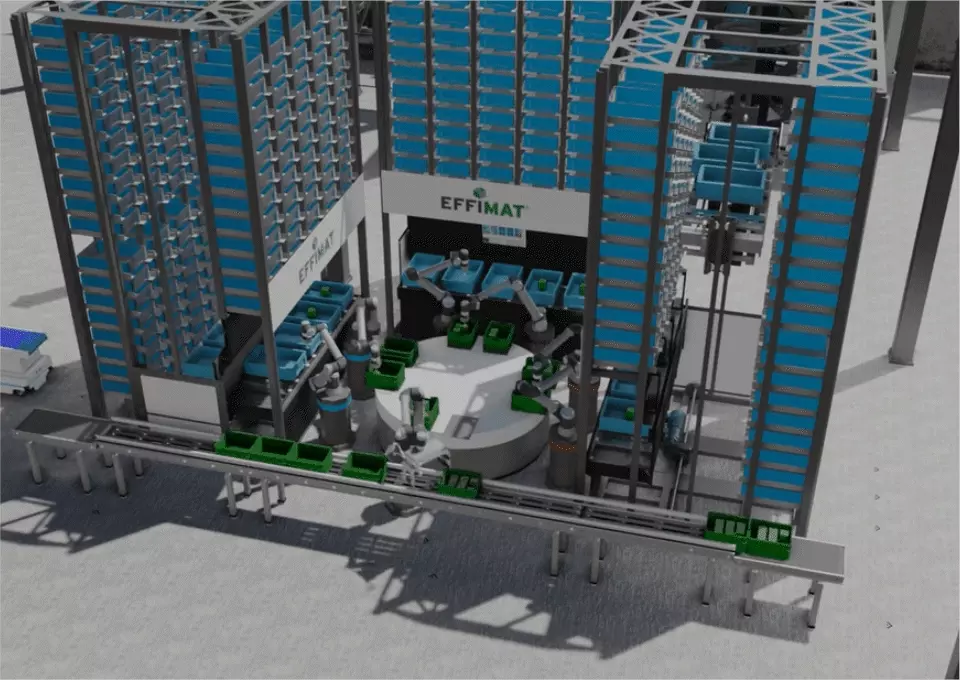
제품 분류 투입 피스피킹(Piece Picking) 로봇 구현 프로젝트
Vision 시스템과 다관절 로봇을 결합하여 제품을 구분하고 주문 정보 기반 로봇을 투입하여 제품을 자동으로 탐색 & 피킹하는 시스템을 구현합니다.
학습 포인트
∙ Piece Picking 로봇의 개념과 주요 응용 분야를 학습합니다.
∙ 제품 보관 & 주문 분류를 위한 물류 자동화 환경을 구축하는 방법을 학습합니다.
∙ 컴퓨터 비전으로 다양한 제품이 혼합된 환경에서도 높은 인식률을 유지하는
알고리즘을 개발하는 방법을 학습합니다.
주요 구현 기능
∙ Object Recognition & Segmentation (제품 탐색 및 분류)
∙ Motion Planning (경로 계획 및 로봇 제어)
∙ Object Distribution (물체 분류 투입 시퀀스 구성)
∙ Piece Picking 로봇의 개념과 주요 응용 분야를 학습합니다.
∙ 제품 보관 & 주문 분류를 위한 물류 자동화 환경을 구축하는 방법을 학습합니다.
∙ 컴퓨터 비전으로 다양한 제품이 혼합된 환경에서도 높은 인식률을 유지하는
알고리즘을 개발하는 방법을 학습합니다.
주요 구현 기능
∙ Object Recognition & Segmentation (제품 탐색 및 분류)
∙ Motion Planning (경로 계획 및 로봇 제어)
∙ Object Distribution (물체 분류 투입 시퀀스 구성)
수강생 한정 강의 관련 오픈 커뮤니티 질의응답까지!
현직 로봇틱스 엔지니어와의 질의응답
1) 실습 중 에러가 나면? 커뮤니티 채널을 통해 빠른 해결!
2) 강의를 듣다가 이해되지 않는 부분이 생기면 바로 질문하세요!
* 강사님께서 직접 질문에 답변해주시는 기간은
2025년 2월 28일 ~ 2027년 02월 28일까지 운영되며
그 이후에는 패스트캠퍼스 AI 기능을 활용하여 질문에 답변 받으실 수 있습니다.
* 강사님이 현업 중 답변 하시기에 답변까지 영업일 기준 7일 내외 시간이 소요될 수 있습니다.
* 강의와 무관한 질문에 대해서는 답변이 필수로 제공되지 않습니다.
2025년 2월 28일 ~ 2027년 02월 28일까지 운영되며
그 이후에는 패스트캠퍼스 AI 기능을 활용하여 질문에 답변 받으실 수 있습니다.
* 강사님이 현업 중 답변 하시기에 답변까지 영업일 기준 7일 내외 시간이 소요될 수 있습니다.
* 강의와 무관한 질문에 대해서는 답변이 필수로 제공되지 않습니다.
한 번의 구매로 평생 소장!
언제든, 몇 번이든 다시!
한 번 결제로 평생 동안 무제한 반복 학습이 가능합니다.
바쁜 일정에 걱정할 필요 업싱, 원하는 때에 학습하고 필요할 때마다 복습하세요.
바쁜 일정에 걱정할 필요 업싱, 원하는 때에 학습하고 필요할 때마다 복습하세요.
아무리 구성이 좋아도 누구나 가르친다면 의미 없죠!
풍부한 실무 경험을 보유하신 로봇틱스 엔지니어 전문가를 모셨습니다!

우일
현) Roboe Technologies. Inc. 선임 제품개발 관리자
전) 로보아르테 CTO
전) CJ Logistic 물류 자동화 로봇 개발
전) 두산로보틱스 로봇 Application SW 기획, 개발
강사님께서 참여하였던 주요 프로젝트
· 협동로봇 적용 분야 연구 및 관련 기능 개발
(Pick & Place, ML, Deburring, Polishing, Screw Driving,
Dispensing, Welding, 2D Vision)
· 협동로봇 개발(물류 피스피킹 로봇, 협동로봇 응용 소프트웨어,
CAD 기반 로봇 경로 생성 프로그램, 조리용 튀김 로봇)
· 로봇 주변 장치 연결 및 로봇 연동 운영
-
강사님 한마디
실제 현장에 쓰이는 로봇에는 생각보다 굉장히 오랫동안 '눈'이 없었습니다만 고성능 3D 카메라와 함께, TOF 카메라, 스테레오 비전 카메라 등과 이를 활용한 이미지 프로세싱 알고리즘이 발전하면서 이전에는 고정된 위치에서 일정한 작업만 수행할 수 있었던 로봇이 시각 정보에 따라 적합한 작업을 수행할 수 있게 되었습니다. 현재는 제조, 물류 등의 분야에서 대상물이 다양하거나 위치가 변화하는 환경에 주로 활용되고 있습니다. 이번 강의에서는 실제 현업에서 겪었던 문제들을 바탕으로 로봇 모션 제어와 비전 기술을 실습 위주의 학습으로 이해하면서 수강 후 산업 현장에서 컴퓨터 비전 기반 협동 로봇 시스템을 설계할 수 있는 역량을 제공 해 드릴 예정입니다.
차근차근 배워 나가는 로보틱스 시리즈
로봇 아카데미 코스 로드맵
로보틱스 시리즈 미리보기
로보틱스 시리즈는 로봇 분야 취업을 희망하는 분들과 연구원,
실무 엔지니어 등을 위한 난이도/주제별 체계적인 로드맵 제공할 예정입니다.



Q&A
Question.1
• 로봇 공학 입문에 관심을 가지시는 분
• 로봇틱스 및 로봇 비전 응용 기술을 활용하여 개발을 하고 싶어하는 엔지니어
• 로봇틱스 및 로봇 비전 응용 기술을 활용하여 개발을 하고 싶어하는 엔지니어
Question.2
해당 주제의 학습이
중요한 이유는 무엇인가요?
중요한 이유는 무엇인가요?
AI, 그 다음 큰 흐름은 로봇이라고 할 수 있습니다. AI로 인한 디지털 공간 상의 급격한 발전이
인간에게 효과적으로 영향을 미치려면 실제 공간과 AI 기술을 연결하는 매개체인 로봇 기술의
확산이 따라올 수 밖에 없습니다. 비전 기술은 이러한 로봇 기술 발전의 가장 핵심적인 분야로
로봇 분야에 첫발을 딛고자 하는 분께 적절한 주제라고 할 수 있습니다.
Question.3
필요한
선수지식이 있을까요?
선수지식이 있을까요?
• Python 프로그래밍 기초(개발 환경에 나와 있는 라이브러리 활용 가능 수준)
• 간단한 수학 개념(행렬 연산, 좌표 변환)에 대한 이해가 있으면 더욱 좋습니다. (필수는 아닙니다.)
• 간단한 수학 개념(행렬 연산, 좌표 변환)에 대한 이해가 있으면 더욱 좋습니다. (필수는 아닙니다.)
Question.4
개발환경
• Python 3.1(OpenCV, Numpy, Matplotlib, SciPy 라이브러리 활용)
• Visual Studio Code
• CopelliaSim Edu
• Visual Studio Code
• CopelliaSim Edu
협동로봇 개발을 위한 다관절 로봇 티칭과 구현