
Question.1
어떤 분들이
수강하시면 좋을까요?
Matlab
Matlab & Simulink
로봇행동제어
로봇 행동 제어를 위한 제어 공학과 Matlab 활용
[ROBO-ZONE: 외부인 출입 금지 - 로봇 실무 구역] 로봇 행동 제어 Package
로봇 행동 제어 학습을 위한
제어 공학 & MATLAB 핵심
출처 : 현대자동차
[ 로봇을 움직이기 위한

로봇의 움직임을 직접 결정하는
제어 시스템을 이번 강의에서 학습합니다.
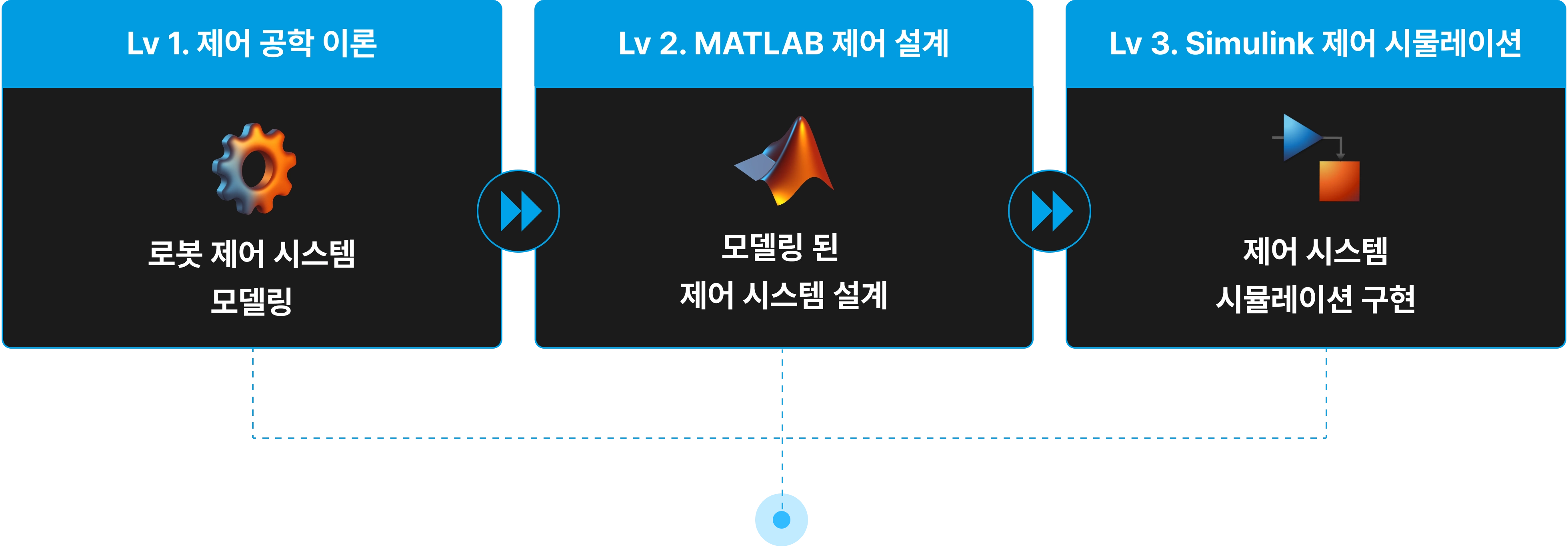
[ 제어 시스템 4단계 학습 로드맵 ]

Gazebo와 Simulink를 연동하여 로봇 행동을
제어할 수 있는 모바일 로봇을 개발합니다.

Final Project . Gazebo와 Simulink를 활용한 모바일 로봇 개발
실시간으로 모바일 로봇의 제어 성능과 제어기 파라미터 튜닝 결과의 효용을 분석하면서 유통/물류 환경에서 제품을 목적지까지 안전하게
배송할 수 있는 모바일 로봇을 개발합니다.
오차 없이 로봇 행동을 설계하기 위해
MATLAB & Simulink를 활용한 로봇 행동 제어 학습은 필수입니다!
MATLAB & Simulink를 활용한 로봇 행동 제어 학습은 필수입니다!

MATLAB, Simulink, Gazebo는
각각 어떤 도구인가요?


Point 01
로봇 행동 제어 개념 학습을 위한
제어 공학 6가지 구성 요소 학습
물리 법칙에 따르는 로봇을 수학적 모델로 표현하면서 복잡한 기계 시스템을 구조화하여
로봇 시스템을 제어하는 방법을 학습합니다.
로봇 행동 제어에 필요한 제어 공학 6가지 개념 학습
Point 02
MATLAB과 Simulink를 활용하여
로봇 행동 제어 구현 방법 학습
MATLAB 함수와 Simulink 모듈 사용법을 학습하고
로봇 행동을 제어할 수 있는 제어기 설계를 구현합니다.
Step 01
로봇 기초 행동 구성에 필요한 MATLAB 4가지 기초 요소 학습
로봇 행동의 움직임과 제어가 어떻게 수식 및 데이터로 표현될 수 있는지 학습합니다.
배열 생성 및 연산
로봇의 상태(위치, 속도, 가속도 등)는 전부 벡터/행렬로 표현되어
이를 다루기 위한 연산 방법을 학습합니다.
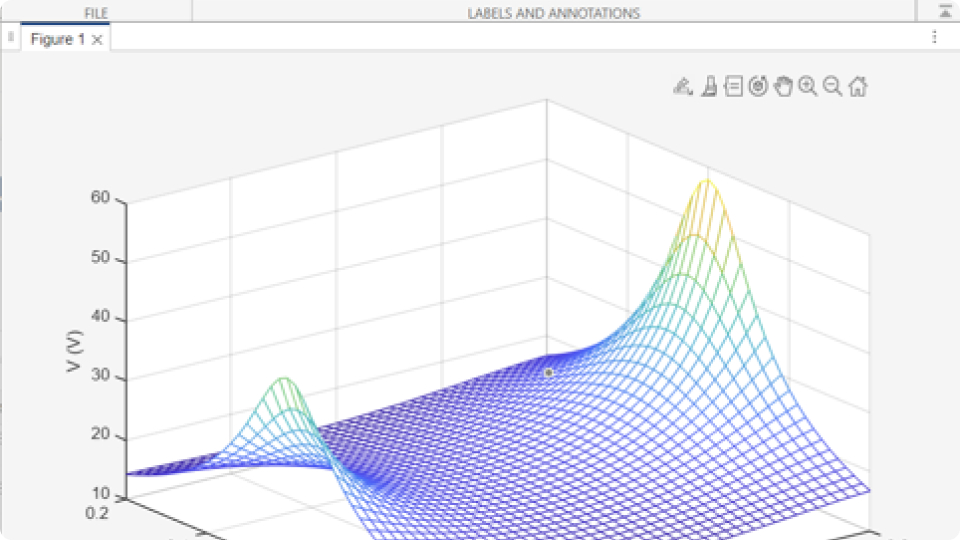
데이터 처리 및 그래프
로봇 행동의 오차, 응답 속도, 제어 입력 등을 비교 분석하여 로봇 제어기를
개선하기 위한 방법을 학습합니다.
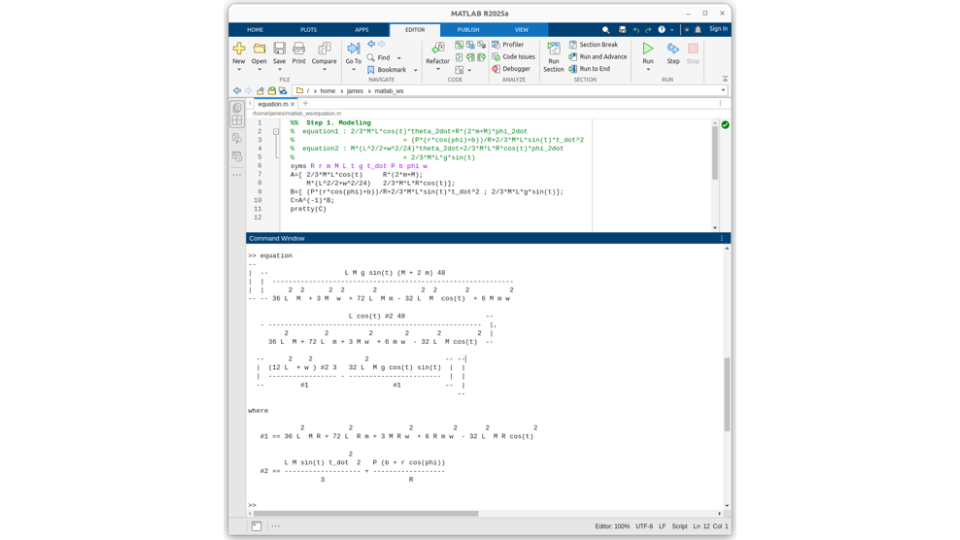
Symbolic 변수와 미분방정식 풀이
로봇의 운동 방정식을 유도하고 해석하여
로봇의 움직임을 수식으로 설명하는 방법을 학습합니다. .
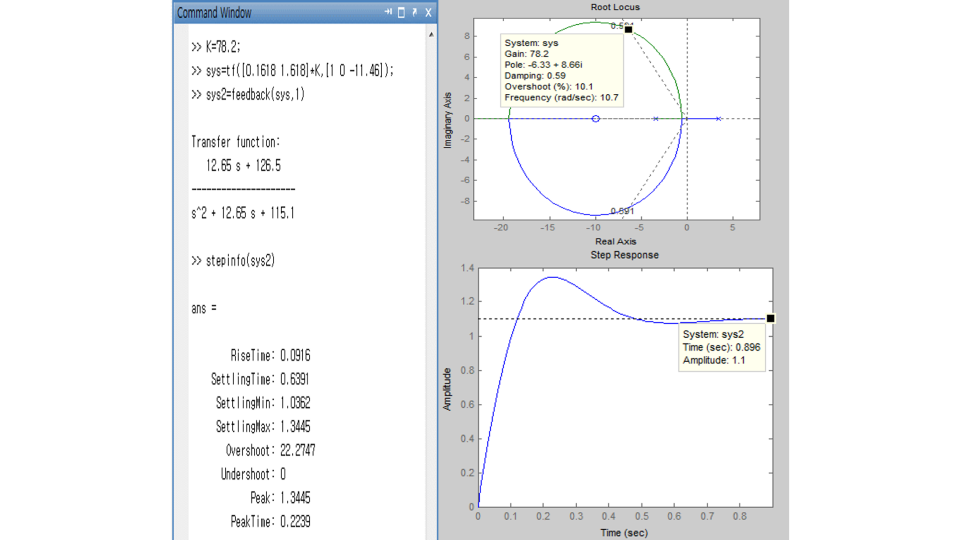
LTI 모델 활용(상태공간 방정식, 전달함수, 루트로커스)
로봇의 운동을 선형 모델로 표현하여
로봇 제어기를 설계하는 방법을 학습합니다.
Step 02
Simulink를 활용하여 블록 다이어그램 표현 실습 구현
설계한 로봇 제어 이론을 실제 움직임에 반영하여 행동을 검증하는 방법을 학습합니다.
로봇 행동 제어 시스템의 실제 구동 원리를
학습할 수 있는 블록 다이어그램 표현 실습 구현
학습할 수 있는 블록 다이어그램 표현 실습 구현
∙ 로봇의 물리적 동작을 모델링하는 방법을 학습합니다.
∙ 로봇 동작을 해석하고 검증하여 행동 목적에 알맞게 제어기를 설게하는 방법을 학습합니다.
∙ 로봇 동작을 해석하고 검증하여 행동 목적에 알맞게 제어기를 설게하는 방법을 학습합니다.
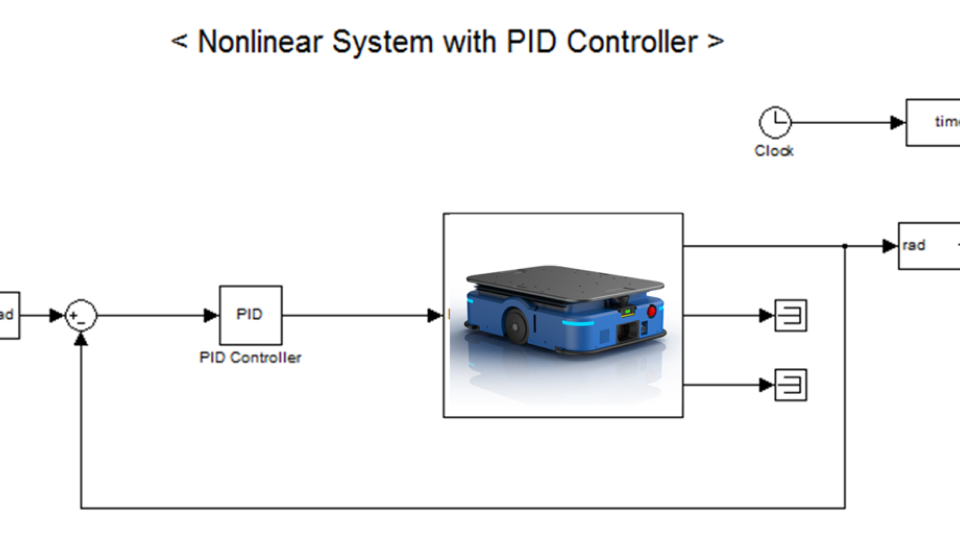
Step 03
모바일 로봇 행동 제어를 위한 Simulink 설계 실습 구현
모바일 로봇 행동을 제어하기 위한 제어기를 직접 설계해볼 수 있는 실습을 진행합니다.
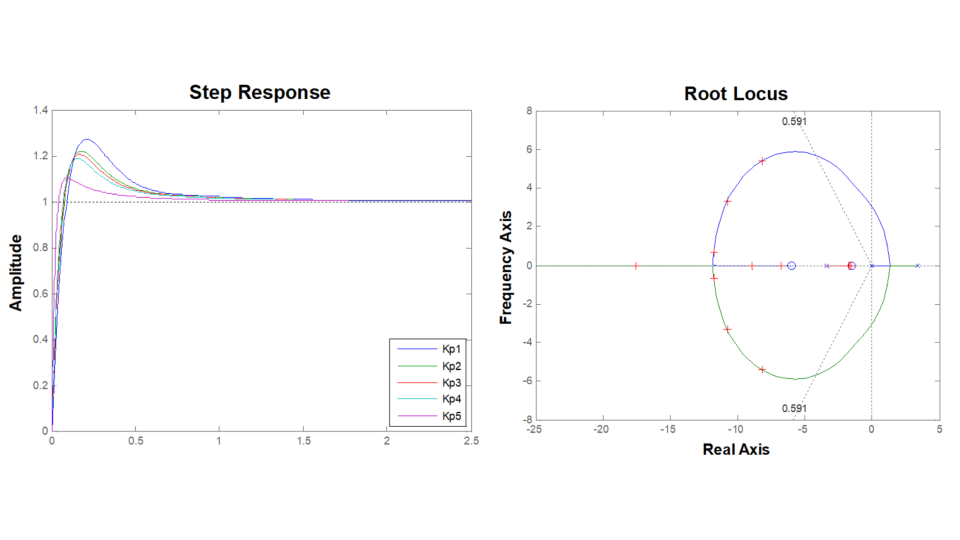
로봇 행동 제어의 가장 기초 제어 방법인 PID 제어를
활용하여 로봇 움직임을 설계해볼 수 있는 실습 구현
활용하여 로봇 움직임을 설계해볼 수 있는 실습 구현
∙ 로봇 제어기 설계부터 응답 측정까지 전체 로봇 행동 흐름을 설계하는 방법을
학습합니다. ∙ 로봇 동작을 설계하는 가장 공식적인 방법인 모델 기반 설계 방법을 학습합니다.
학습합니다. ∙ 로봇 동작을 설계하는 가장 공식적인 방법인 모델 기반 설계 방법을 학습합니다.
Point 03
Gazebo와 Simulink를 활용하여
유통/물류 환경 모바일 로봇 파이널 프로젝트 구현
Gazebo 시뮬레이션 환경과 Simulink를 연동하여 모바일 로봇이 주행하면서
실시간으로 행동을 개선 해 나갈 수 있는 파이널 프로젝트를 진행합니다.
강사 소개

James
현) 로봇 개발 대기업 연구원
-
카이스트 드론/로봇 관련 연구실 석/박사 졸업
강사님께서 참여하셨던 주요 프로젝트
로봇 자율 주행, 경로 계획 알고리즘 개발, 실내 항법 경진대회 참여
Matlab을 활용한 로봇 시뮬레이션 & 제어기 개발 수행
수강생 한정 강의 관련 오픈 커뮤니티 질의응답까지!
강사님과 무한 질의응답이 가능합니다,
강사님과 무한 질의응답이 가능합니다,
1) 실습 중 에러가 나면? 질의응답 채널을 통해 빠른 해결!
2) 강의를 듣다가 이해되지 않는 부분이 생기면 바로 질문하세요!
* 강사님께서 직접 질문에 답변해주시는 기간은 2025년 8월 1일 ~ 2028년 8월 1일까지 운영되며
그 이후에는 패스트캠퍼스 AI 기능을 활용하여 질문에 답변 받으실 수 있습니다.
* 강사님이 현업 중 답변 하시기에 답변까지 영업일 기준 7일 내외 시간이 소요될 수 있습니다.
* 강의와 무관한 질문에 대해서는 답변이 필수로 제공되지 않습니다.
2) 강의를 듣다가 이해되지 않는 부분이 생기면 바로 질문하세요!
* 강사님께서 직접 질문에 답변해주시는 기간은 2025년 8월 1일 ~ 2028년 8월 1일까지 운영되며
그 이후에는 패스트캠퍼스 AI 기능을 활용하여 질문에 답변 받으실 수 있습니다.
* 강사님이 현업 중 답변 하시기에 답변까지 영업일 기준 7일 내외 시간이 소요될 수 있습니다.
* 강의와 무관한 질문에 대해서는 답변이 필수로 제공되지 않습니다.

한 번의 구매로 평생 소장!
언제든, 몇 번이든 다시!
언제든, 몇 번이든 다시!
한 번 결제로 평생 동안 무제한 반복 학습이 가능합니다.
바쁜 일정에 걱정할 필요 업싱, 원하는 때에 학습하고 필요할 때마다 복습하세요.
바쁜 일정에 걱정할 필요 업싱, 원하는 때에 학습하고 필요할 때마다 복습하세요.
• 제어 이론을 실제 로봇에 적용하고 싶은 학/석사생(기계공학, 전기전자 등 로봇 분야 연구가 아닌 곳에서 로봇 개발을 희망하는 수강생)
• 로봇을 설계하면서 실제 환경에서 구동/제어에 어려움을 느끼는 로봇 개발자
• 로봇을 설계하면서 실제 환경에서 구동/제어에 어려움을 느끼는 로봇 개발자
Question.2
강의를 수강한 후 어떤 것들을
학습할 수 있을까요?
학습할 수 있을까요?
• 시뮬레이션을 활용한 로봇 행동 제어 학습
• 로봇 모델링
- 목표를 달성하기 위해 선정한 하드웨어 스펙이 잘 맞는지, 로봇을 구동하기 위한 제어기가 잘 맞는지 등 하드웨어 설계 전 미리 확인해볼 수 있습니다.
• 로봇 모델링
- 시뮬레이션이 잘 이루어지기 위한 로봇 구동 부품들의 모덷링 방법과 그에 맞춰
MATLAB을 활용한 제어기 설계와 테스트 및 튜닝 방법을 학습합니다.
Question.3
강의 커리큘럼의 주제와 내용은
어떤 기준으로 선정하였나요?
어떤 기준으로 선정하였나요?
제어기를 설계하기 위한 기초 제어 공학부터 이를 바탕으로 MATLAB, Simulink 활용 방법을 같이
학습합니다.
제어기 설계에 필요한 기본 함수들부터 로봇 제어기 설계 프로젝트를 직접 경험 해 보면서 설계 방법을 학습하고 마지막으로 Gazebo 시뮬레이터와 연동하여 설계한 제어기를 직접 검증해볼 수 있습니다.
이를 통해 실제 로봇이 개발되는 전 과정을 강의를 통해 학습해볼 수 있게 커리큘럼의 순서를 구성하였습니다.
제어기 설계에 필요한 기본 함수들부터 로봇 제어기 설계 프로젝트를 직접 경험 해 보면서 설계 방법을 학습하고 마지막으로 Gazebo 시뮬레이터와 연동하여 설계한 제어기를 직접 검증해볼 수 있습니다.
이를 통해 실제 로봇이 개발되는 전 과정을 강의를 통해 학습해볼 수 있게 커리큘럼의 순서를 구성하였습니다.
Question.4
개발 환경
• ROS 2 Humble
• Gazebo
• Visual Studio Code
•MATLAB / Simulink (유료)
• Gazebo
• Visual Studio Code
•MATLAB / Simulink (유료)
• Standard(상업 · 기업용) : 1,308,000원 / 연
• Education(교육용) : 550,000원
• Education(학생용) : 캠퍼스 별 계정이 존재한다면 무료 활용 가능