ROBOTIS의 자율주행로봇, '개미'
ROBOTIS는 자율주행로봇 ‘개미’ 로 실시간 장애물 인지부터
회피, 층간 이동 등 안정적으로 배달 진행에 성공하며
배송 서비스 상용화에 적극 나서고 있습니다.


최근 주목 받고 있는 Mobile Manipulator 로봇을 개발하기 위해 경로 탐색과 자연스러운 행동을 제어하는 Motion Planning을 학습합니다.
인간과 로봇이 공존하는 시대가 다가오면서,
주어진 환경에서 자연스러운 움직임을 개발하기
위한 기술은 더욱 중요해지고 있습니다.
ROBOTIS, ABB, Amazon 등
국/내외를 불문하고 로봇 산업을 이끄는 주요 기업들은
로봇의 유연한 움직임을 위한 최적의 경로를 찾기 위해 고민하고 있습니다.
ROBOTIS의 자율주행로봇, '개미'
ROBOTIS는 자율주행로봇 ‘개미’ 로 실시간 장애물 인지부터
회피, 층간 이동 등 안정적으로 배달 진행에 성공하며
배송 서비스 상용화에 적극 나서고 있습니다.
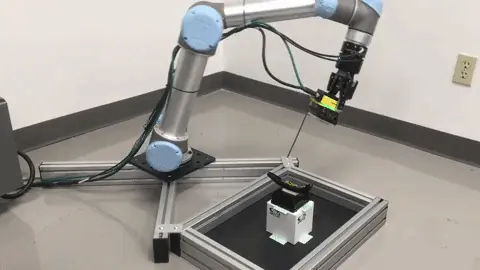
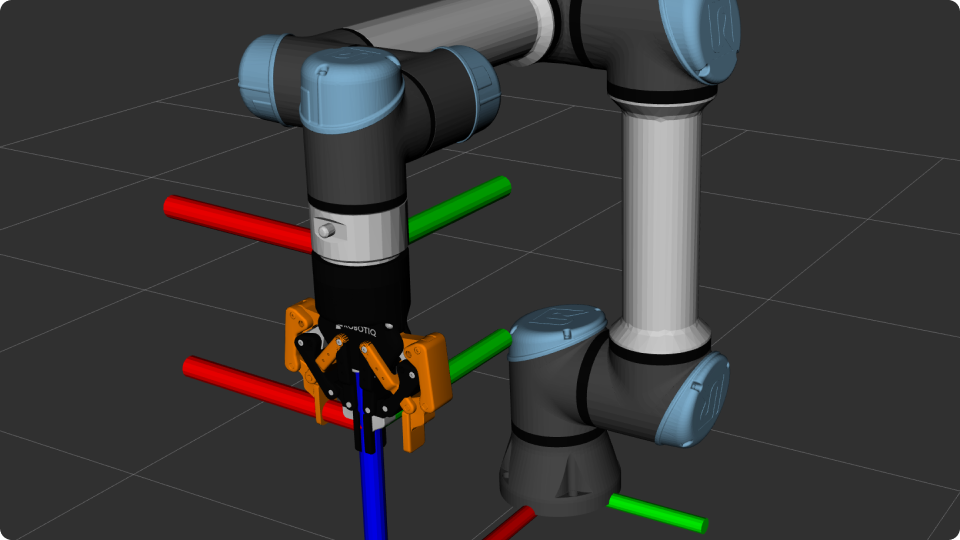
로봇팔의 대중화를 이끈 Universal Robotics, ‘Cobot’
Universal Robotics의 협동 로봇인 Cobot은 Inverse Kinematics(IK)
기반의 경로 최적화,경로 탐색 알고리즘 등을 활용하여
다양한 산업 분야에서 정밀한 조작을 수행하고 있습니다.
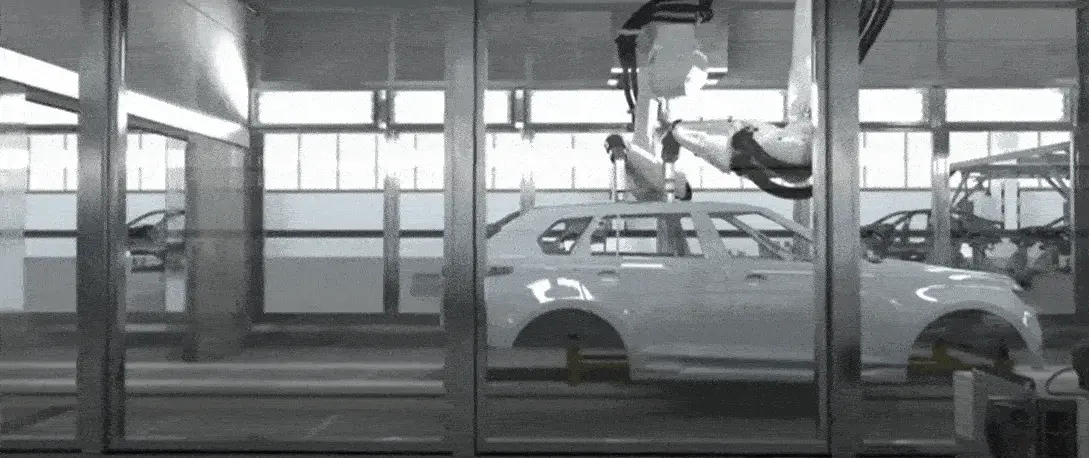
ABB의 차량 도장 작업 자동화 로봇, ‘PixelPaint’
PixelPaint는 자동차 표면의 곡률 보정과 균일한 도장 품질을 유지하며
사람을 대신해 정밀한 차량 도장 작업을 수행하고 있습니다.
Amazon의 AMR 로봇, ‘Proteus’
Proteus는 물류 창고 좁은 공간 내 근무하는 작업자들과 충돌 없이
자유롭게 이동하면서 물류 운반 작업을 수행하고 있습니다.

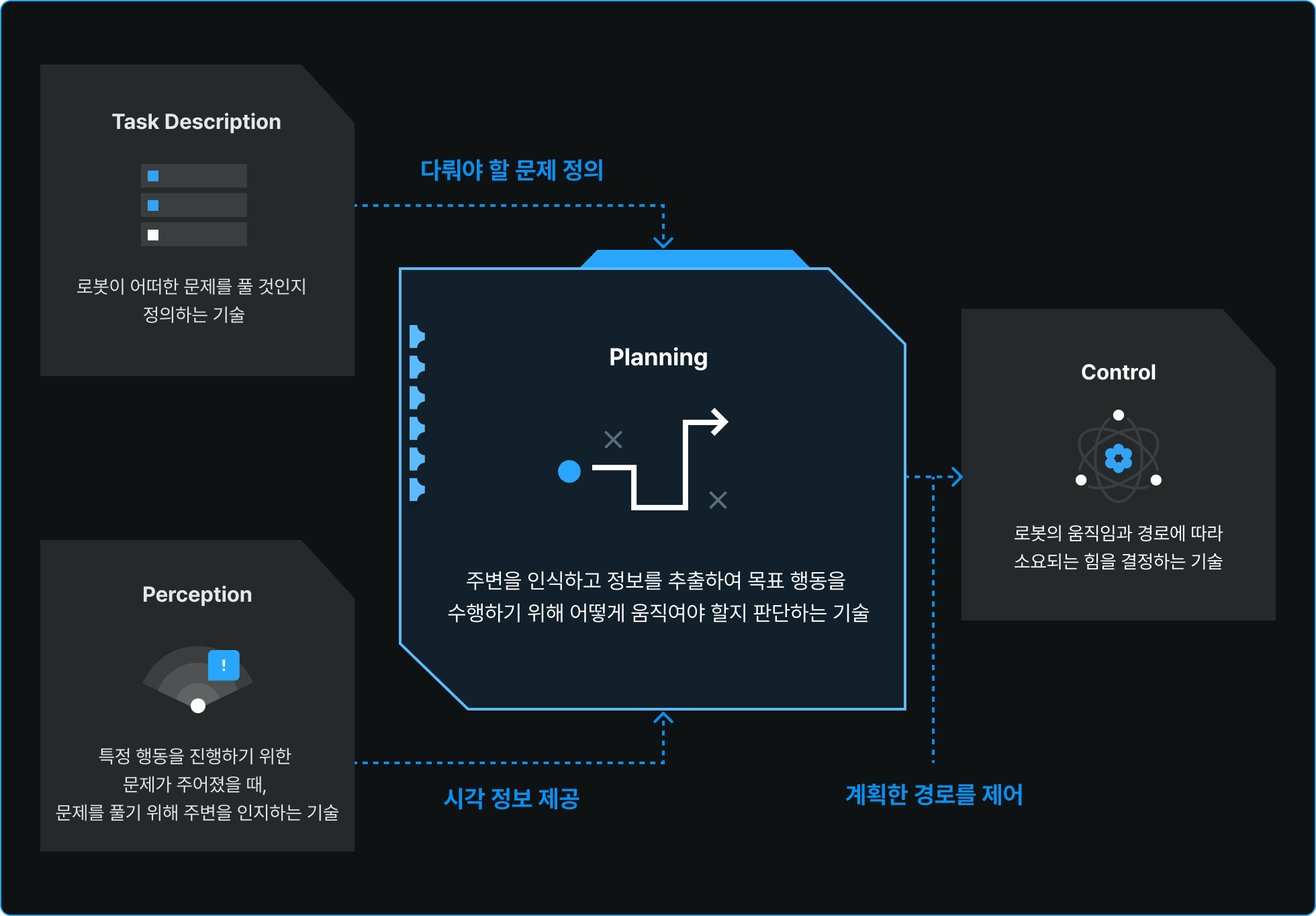
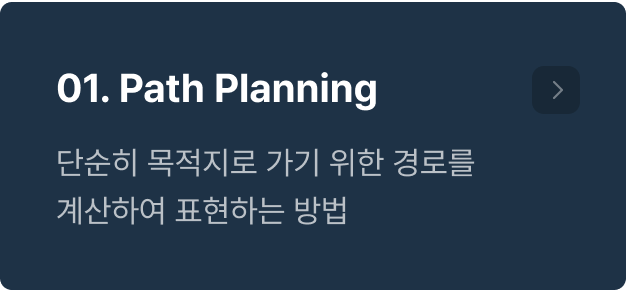
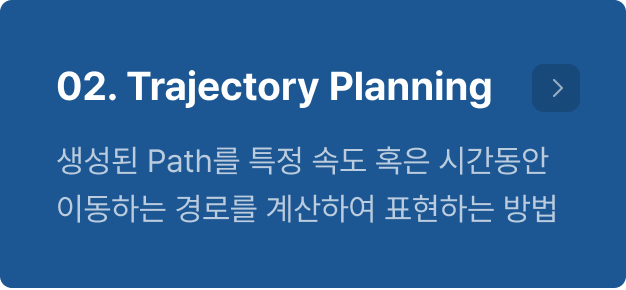
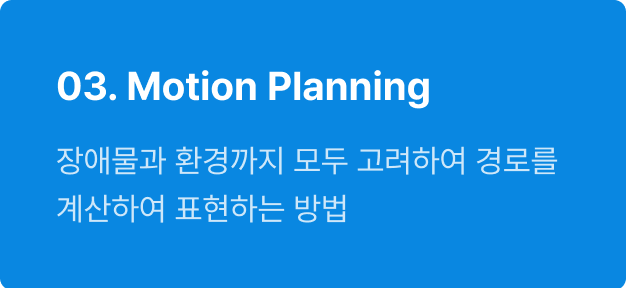
정답은 바로 Planning!
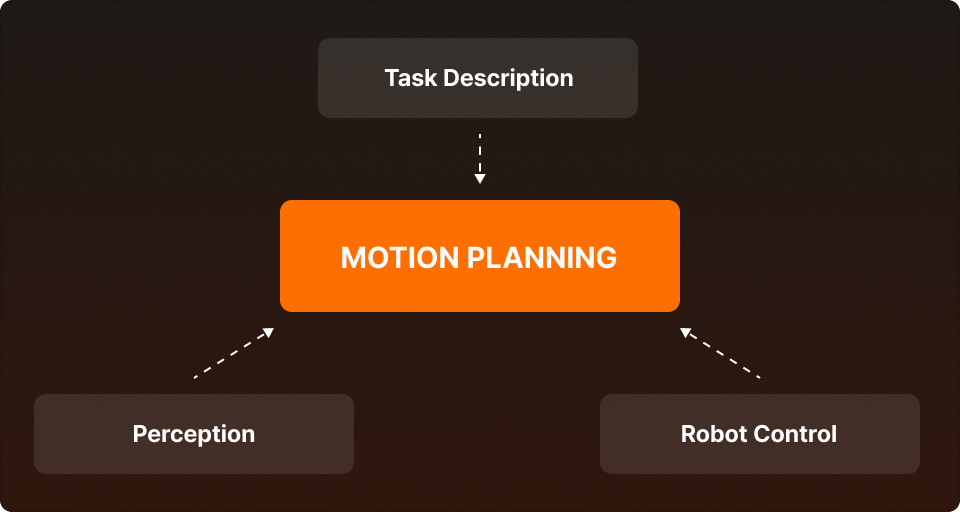
특히 로봇의 경로 탐색과 자연스러운 행동을 제어하기 위해
3단계로 구성된 Motion Planning 기술을 반드시 알아야 합니다.


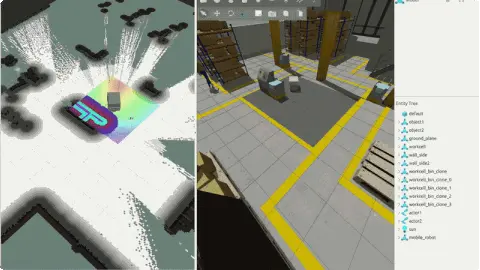
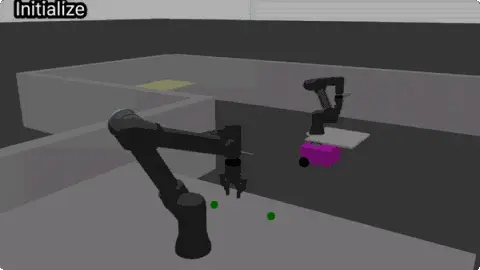
Motion Planning을 적용해
복잡한 환경에서 활용 가능한 Mobile Manipulator를 개발합니다
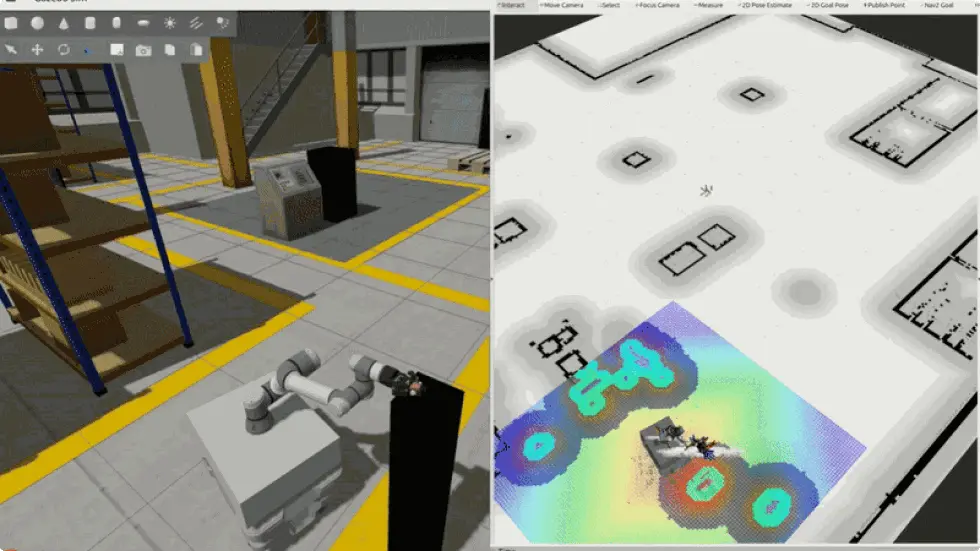
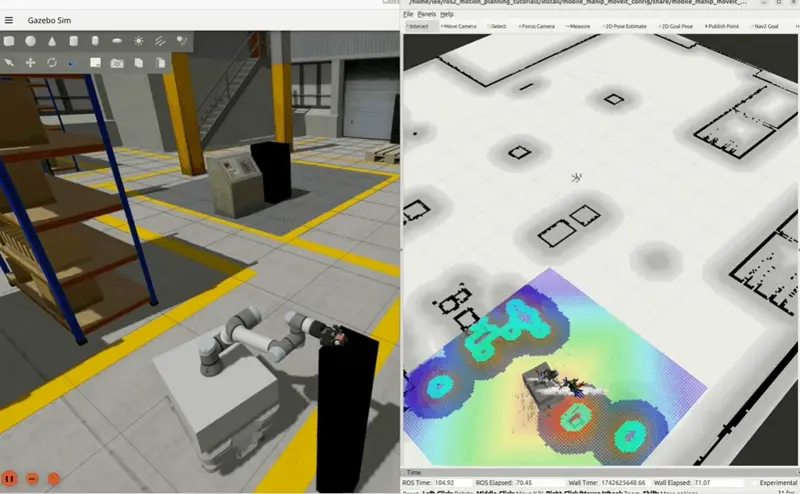
Final Project. ROS 2 기반 Nav 2와 MoveIT2를 활용하여 배달 로봇에 활용될 수 있는 Mobile Manipulator 개발
실시간으로 바뀌는 외부 환경 속에서 Task Management 개념을 활용하여 로봇 팔로 배송 물품을 싣고
예상치 못한 장애물을 회피하면서 주행할 수 있는 Mobile Manipulator를 개발합니다.
국내 최초
ROS 2로 시작하는 로보틱스 Motion Planning
학습을 위한 핵심 4가지 학습 포인트
실제 환경에서 고려해야 할
최적화 기법 중심의 실습 강의로 기획하였습니다.
POINT 01
Motion Planning 구현을 위해
필요한 5가지 구성 요소 학습
로보틱스의 구성요소 중 Planning(Motion Planning)이 가장 중요한 이유와
Motion Planning을 이루고 있는 주요 5가지 구성 요소를 학습합니다.
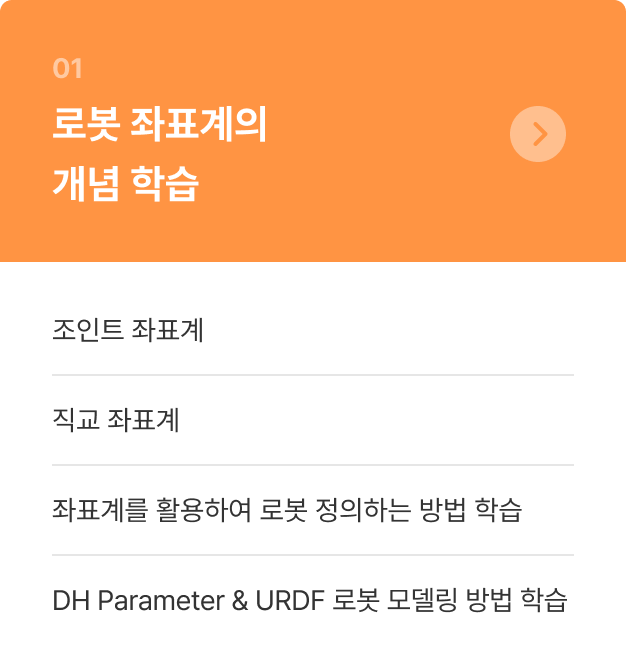
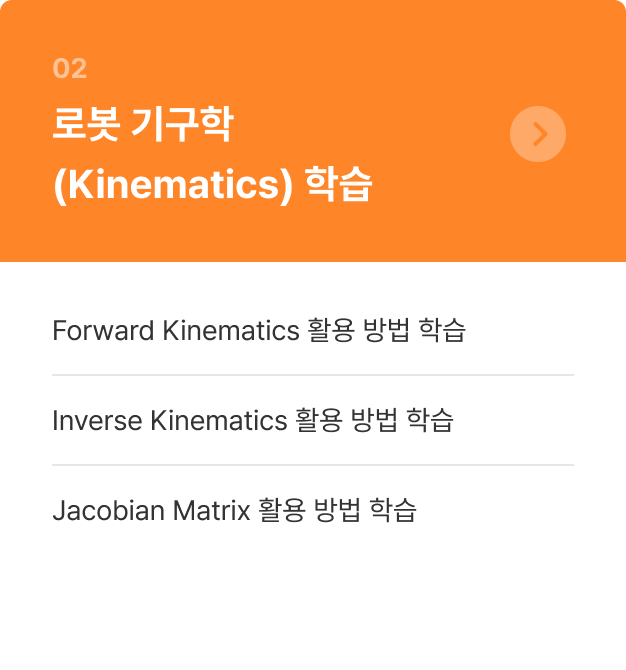
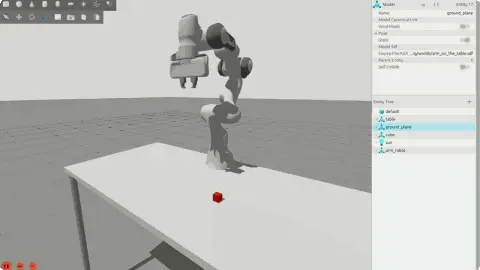
Forward Kinematics & Inverse Kinematics를 활용하여 로봇의 움직임을 보여줄 수 있는 실습을 구현합니다.
POINT 02
Motion Planning을 로봇에 응용할 때
활용되는 대표 3가지 방법 학습
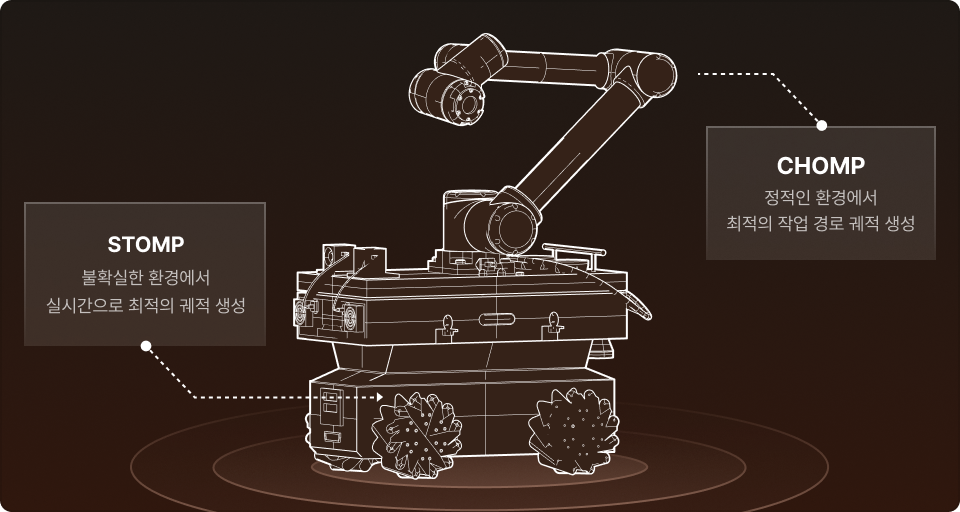
샘플링, 최적화 기법을 학습하여 실제 로봇이 이동 가능한 궤적을
구성할 때 고려해야 할 요소들을 학습합니다.
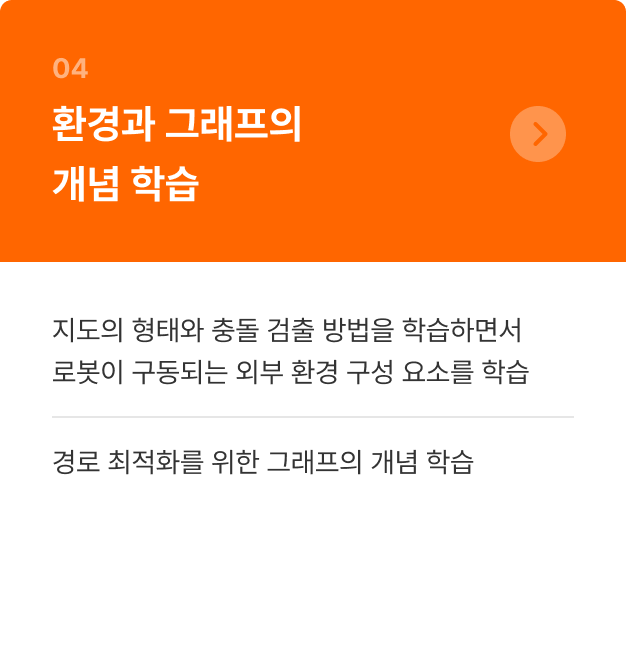
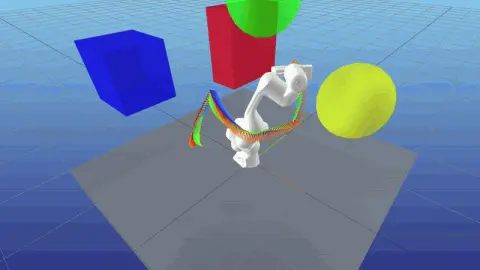
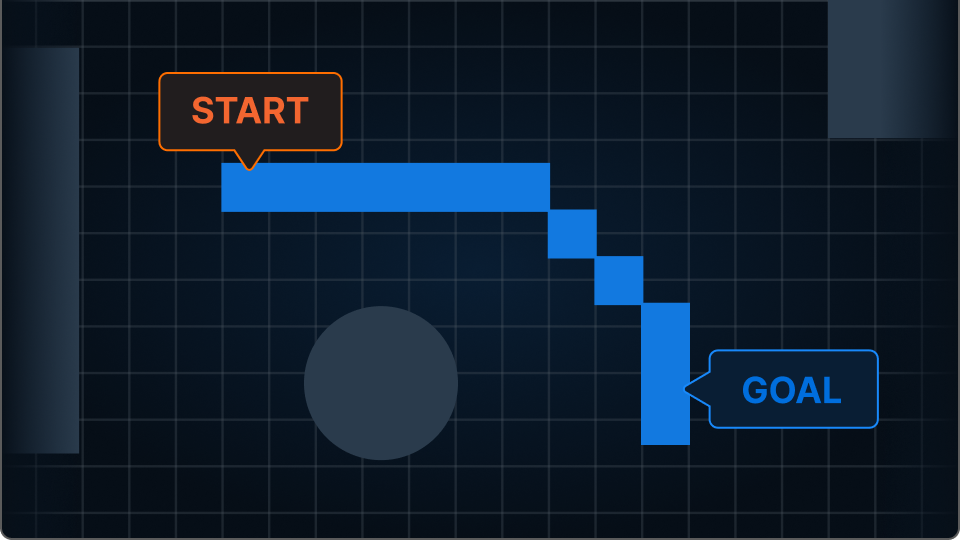
탐색 공간의 균형 잡힌 샘플링 기법을 통해서 공간을 효과적으로 탐색할 수 있는 방법을 학습합니다.
 그래프 최단 알고리즘을 활용하는 방법을 학습합니다.
구성 공간 내에서 정해진 수만큼 임의의 생플링을 진행하는 방법을 학습합니다.
샘플링 된 노드 중 장애물 영역에 포함된 노드를 제거하는 방법을 학습합니다.
그래프 최단 알고리즘을 활용하는 방법을 학습합니다.
구성 공간 내에서 정해진 수만큼 임의의 생플링을 진행하는 방법을 학습합니다.
샘플링 된 노드 중 장애물 영역에 포함된 노드를 제거하는 방법을 학습합니다.
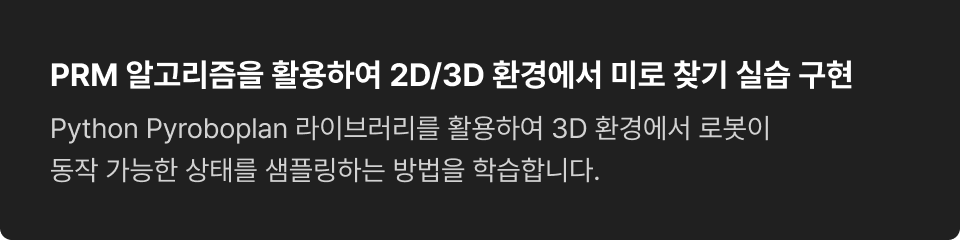
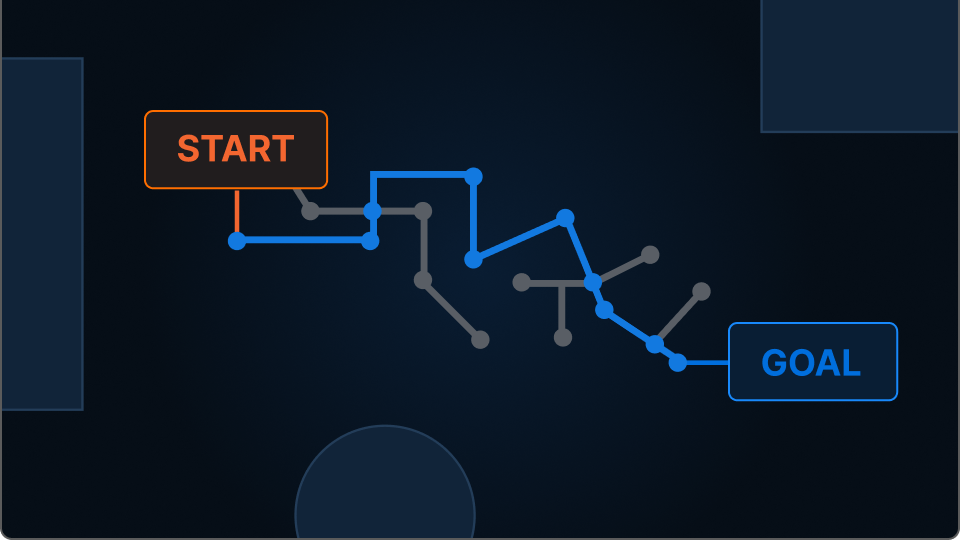
무작위의 샘플을 트리 형태로 확장하여 경로를 찾는 방법을 학습합니다.
동역학적 제약을 고려하여 경로를 탐색하는 방법을 학습합니다.


물리적 제약과 충돌을 최소화하면서 초기 경로를 더 개선하여 경로를 구성할 수 있는 방법을 학습합니다.
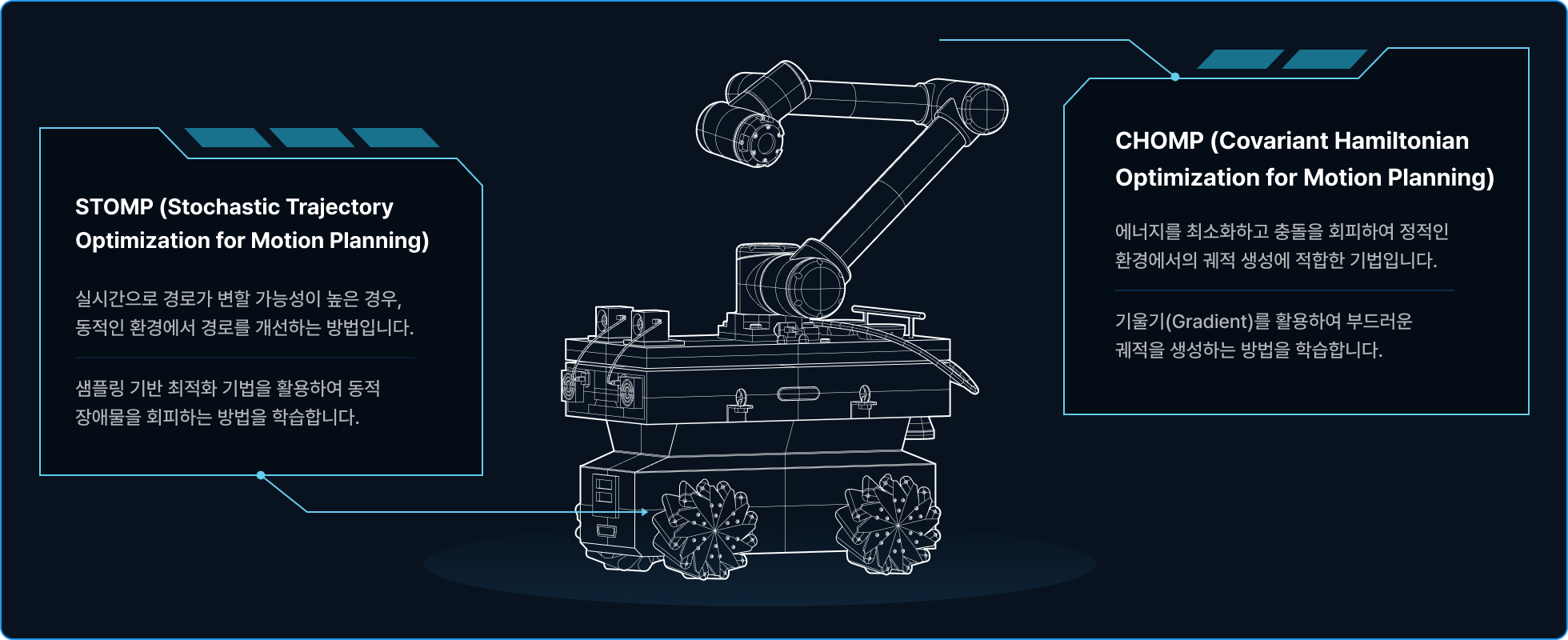

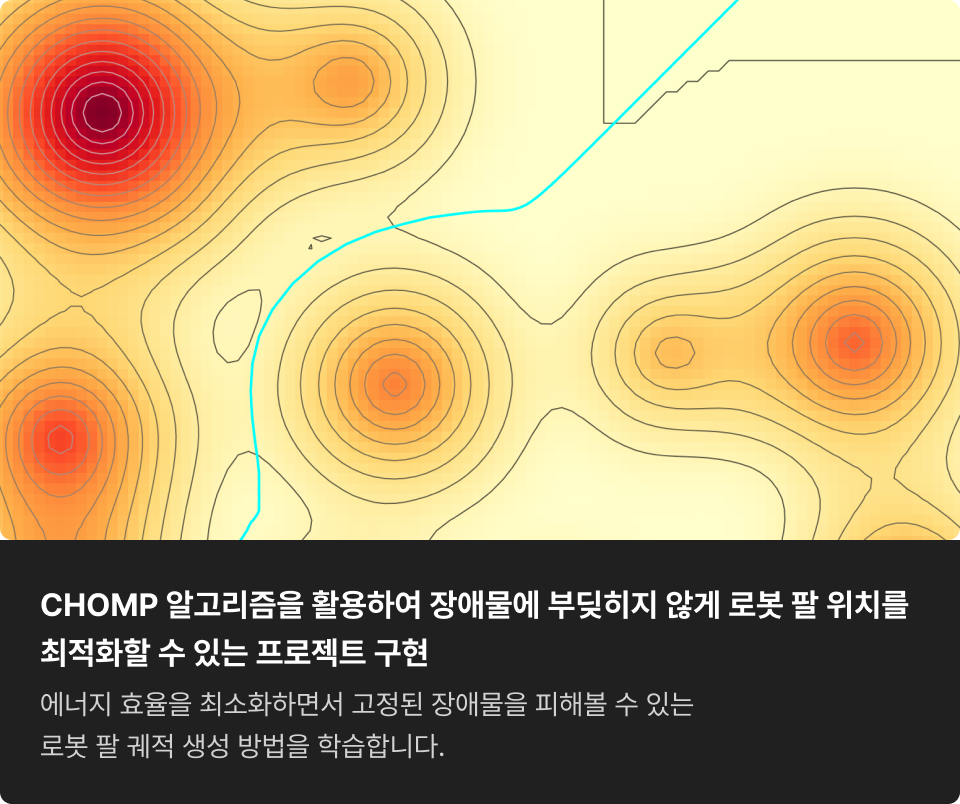

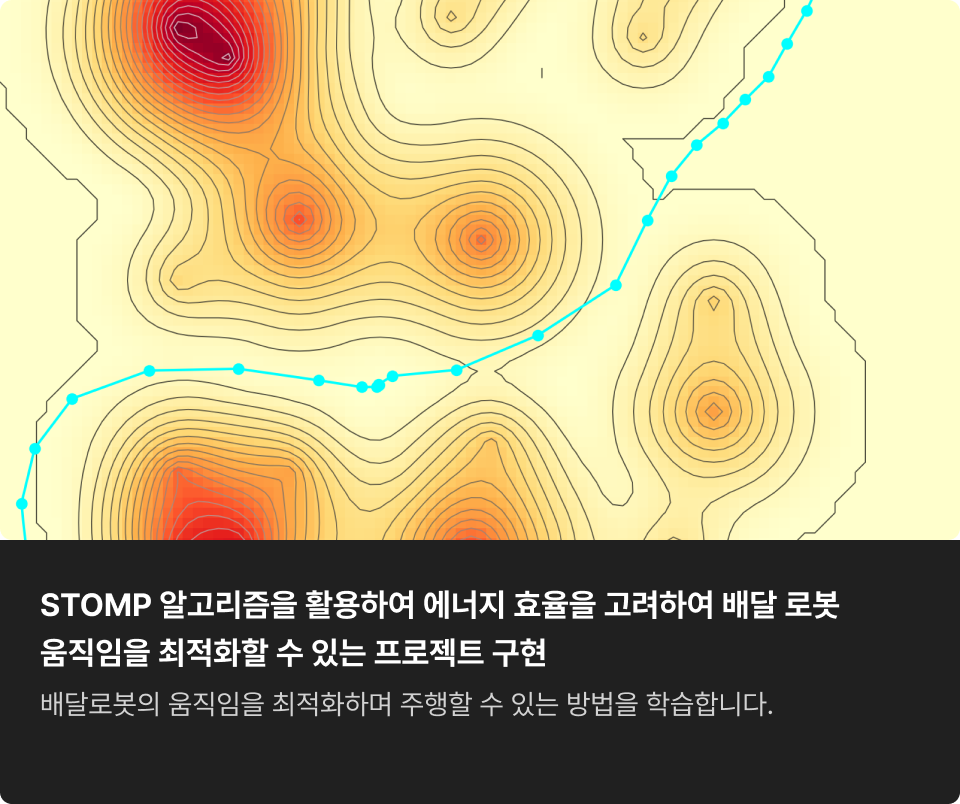
Motion Planning을 활용할 때 더 개선 된 경로 정보를 제공해줄 수 있는 대표 2가지 방법을 학습합니다.
Motion Planning을 활용할 때 더 개선된 경로 정보를 제공해줄 수 있는 대표 2가지 방법을 학습합니다.
POINT 03
Motion Planning을 활용하여 Mobile
Manipulator를 개발하는 파이널 프로젝트 구현
플샘플링, 최적화 기법을 학습하여 실제 로봇이 이동 가능한 궤적을
구성할 때 고려해야 할 요소들을 학습합니다.
Motion Planning을 활용할 때 더 개선된 경로 정보를 제공해줄 수 있는 대표 2가지 방법을 학습합니다.


UR Manipulator와 MoveIt 2 Python API로 Manipulator에 명령을 전달하여 Motion Planning을 수행하는 방법을 학습합니다.
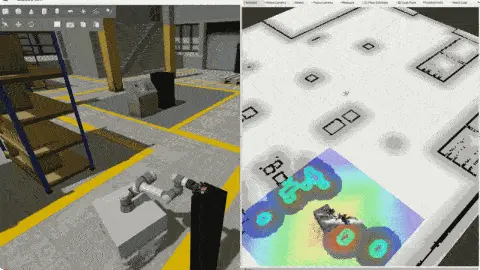
랜덤한 환경에서 배달 로봇이 물건을 싣고 장애물을 회피하여 목적지까지 이동할 수 있는 프로젝트 실습을 구현합니다.
강사 소개

현) University of Illinois Urbana-
Champaign Graduate Research
Assistant
-
Parsoa Lab에서 MR-TMP 알고리즘
개발
- Factory Automation Demo
- Handoff Operation for Manipulators
- Mind in Vitro(MiV)
참여한 주요 프로젝트
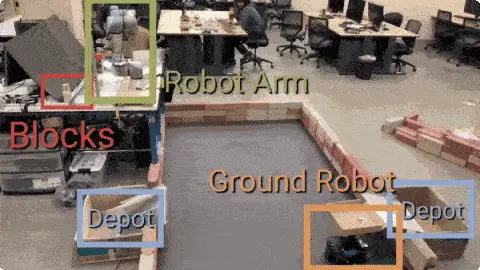
ROS 2의 MoveIt 2와 Nav 2를 활용하여 로봇팔과 모바일 로봇이 협업할 수
있는 데모를 구현하였습니다. Manipulator는 Pick & Place로 물건을 집어
올리고, 모바일 로봇에게 건네주는 과정을 거쳐 모바일 로봇이 최종
목적지까지 물체를 전달할 수 있는 역할을 구성하였습니다.
ROS 2의 MoveIt 2와 Nav 2를 활용하여 로봇팔과 모바일 로봇이 협업할 수
있는 데모를 구현하였습니다. Manipulator는 Pick & Place로 물건을 집어
올리고, 모바일 로봇에게 건네주는 과정을 거쳐 모바일 로봇이 최종
목적지까지 물체를 전달할 수 있는 역할을 구성하였습니다.

커리큘럼
파트 6개클립 249개
패스트캠퍼스 커뮤니티에서 다른 수강생들과 함께 궁금했던 주제에 대해 다양한 관점과 답변을 찾아보세요.
커뮤니티 바로가기학습 규정 및 환불 규정
* 본 상품은 동영상 형태의 강의를 수강하는 상품입니다.
* 상황에 따라 사전 공지 없이 할인이 조기 마감되거나 연장될 수 있습니다.
* 수강 신청 및 결제를 완료하시면, 마이페이지를 통해 바로 수강이 가능합니다.
총 학습기간:
정상 수강기간(유료 수강기간) 최초 30일, 무료 수강 기간은 31일 일차 이후로 무제한이며, 유료 수강기간과 무료 수강기간 모두 동일하게 시청 가능합니다.
본 패키지는 약 26시간 분량으로, 일 1시간 내외의 학습 시간을 통해 정상 수강 기간(=유료 수강 기간) 내에 모두 수강이 가능합니다.
수강시작일: 수강 시작일은 결제일로부터 기간이 산정되며, 결제를 완료하시면 마이페이지를 통해 바로 수강이 가능합니다. (사전 예약 강의는 1차 강의 오픈일)
패스트캠퍼스의 사정으로 수강시작이 늦어진 경우에는 해당 일정 만큼 수강 시작일이 연기됩니다.
일부 강의는 아직 모든 영상이 공개되지 않았습니다. 각 상세페이지 하단에 공개 일정이 안내되어 있습니다.
상황에 따라 사전 공지 없이 할인이 조기 마감되거나 연장될 수 있습니다.
천재지변, 폐업 등 서비스 중단이 불가피한 상황에는 서비스가 종료될 수 있습니다.
본 상품은 기수강생 할인, VIP CLUB 제도 (구 프리미엄 멤버십), 기타 할인 이벤트 적용이 불가할 수 있습니다.
커리큘럼은 제작 과정에서 일부 추가, 삭제 및 변경될 수 있습니다.
쿠폰 적용이나 프로모션 등으로 인해 5만원 이하의 금액으로 강의를 결제할 경우, 할부가 적용되지 않습니다.
환불금액은 정가가 아닌 실제 결제금액을 기준으로 계산됩니다.
쿠폰을 사용하여 강의를 결제하신 후 취소/환불 시 쿠폰은 복구되지 않습니다.
수강시작 후 7일 이내, 5강 미만 수강 시에는 100% 환불 가능합니다.
수강시작 후 7일 이내, 5강 이상 수강 시 전체 강의에서 수강한 강의의 비율에 해당하는 수강료를 차감 후 환불 가능합니다.
수강시작 후 7일 초과 시 정상 수강기간 대비 잔여일에 대해 아래 환불규정에 따라 환불 가능합니다.
환불요청일 시 기준
: 수강시작 후 1/3 경과 전, 실 결제금액의 2/3에 해당하는 금액 환불
: 수강시작 후 1/2 경과 전, 실 결제금액의 1/2에 해당하는 금액 환불
: 수강시작 후 1/2 경과 후, 환불 금액 없음
* 보다 자세한 환불 규정은 홈페이지 취소/환불 정책에서 확인 가능합니다.
[패스트캠퍼스 아이디 공유 금지 정책]
패스트캠퍼스의 모든 온라인 강의에서는 1개의 아이디로 여러명이 공유하는 형태를 금지하고 있습니다.
동시접속에 대한 기록은 내부 시스템을 통해 자동으로 누적되며, 이후 서비스 이용이 제한될 수 있습니다.
[기기제한 정책]
패스트캠퍼스 온라인 강의 시청을 위해서는 ID별 최대 4개의 기기를 등록할 수 있으며, 기기 등록은 온라인 강의장 접속 시 자동 등록됩니다.
최대 갯수를 초과하였을 경우 등록된 기기 해제가 필요합니다.
[저작권 정책]
패스트캠퍼스의 모든 강의는 무단 배포 및 가공하는 행위, 캡쳐 및 녹화하여 공유하는 행위, 무단으로 판매하는 행위 등 일체의 저작권 침해 행위를 금지합니다.
부정 사용이 적발될 경우 저작권법 위반에 의한 법적인 제재를 받으실 수 있습니다.
국내 7개 카드사 12개월 무이자 할부 지원! (간편 결제 제외)