

QUESTION 1
어떤 분들이
수강하시면 좋을까요?
로봇공학
로봇입문
로봇개발
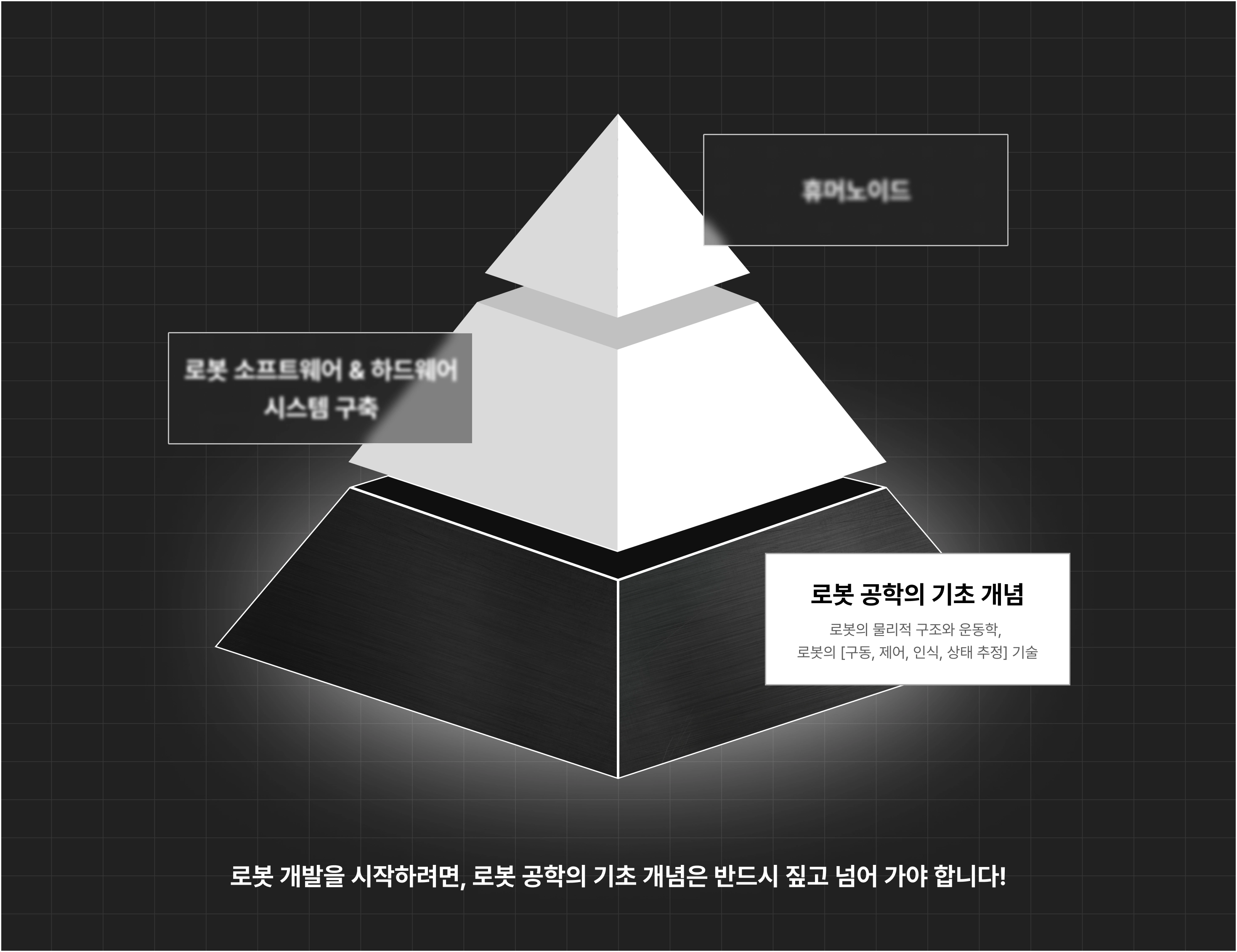
로봇 공학 학습을 위한
핵심 3가지






[ 로보틱스 개발 학습 로드맵 ]
22년 이상 경력의 ROBOTIS Professional 로봇 개발자가 알려주는
‘기초부터 시작하는 로봇 공학 : 로봇 개발의 시작
’

온진욱 강사님
주요 경력
현) ROBOTIS STEAM 개발팀 Professional Engineer
전) 한울로보틱스 지능로봇연구소 차장
전) 동부로봇 연구개발 2팀 선임연구원
전) 매닉스 대리 : 산업용 로봇 Engineering
“ 실제 로봇공학을 이해하고 개발할 수 있는
실용적 역량을 키울 수 있도록 강의를 구성했습니다. ”
로봇공학은 이제 더 이상 미래의 기술이 아닙니다. 물류, 제조, 헬스케어, 서비스 로봇 등 다양한 산업 현장에서 로봇이 활약하고 있습니다. 본 강의는 로봇공학의 기초부터 엑추에이터, 센서 제어 환경 구축 등 실제 개발에 필요한 기술까지 체계적으로 다루어, 수강생이 실무에서 자신 있게 활용할 수 있도록 설계하였습니다. 이후 Forward/Inverse Kinematics를 학습하고, 5가지 로봇 제어 프로젝트와 Teleoperation 파이널 프로젝트로 실전 경험을 쌓습니다. 특히, 단순히 이론을 설명하는 데 그치지 않고, 실습과 실제 프로젝트 중심으로 구성되어 있어 현장에서 마주치는 문제들을 스스로 해결할 수 있는 능력을 키우게 됩니다. 초심자도 부담 없이 학습할 수 있도록 Windows 기반 개발환경을 사용하며, OpenJigware 라이브러리를 통해 실제 소스코드를 수정하고 확장하는 경험도 쌓을 수 있습니다. 강의를 수강한 후에는 로봇공학 분야에서 프로젝트를 주도하거나, 새로운 아이디어를 실현할 수 있는 자신감을 갖게 될 것입니다. 시작은 어렵지만, 이 강의가 여러분의 로봇공학 입문을 위한 최적의 길잡이가 되어드리겠습니다.

4가지 핵심 포인트를 따라오면서
로봇 공학을 한 번에 학습하세요.


비전공자도 로봇 개발에 필요한
기초 로봇 공학을 완벽하게 학습할 수 있는 강의!
Point 01
로봇 공학의 원리를 이해하기 위한
대표 7가지 구성 요소 학습
로봇을 이루고 있는 구성 요소들이 유기적으로 서로 영향을 미치며
작동하는 원리를 학습합니다.
실습 시 활용되는 도구 : C#, Python, Visual Studio, Arduino
Simulator, Excel, OpenjigWare

Point 02
5가지 형태의 로봇 제어 실습으로
로봇 제어 방식과 모션 계획을 학습
로봇 공학의 핵심 개념들이 로봇 형태 별 고려해야 할
제어 방식과 모션 계획으로 응용되는 과정을 학습합니다.
실습 시 활용되는 도구 : Pybullet, OpenjigWare
(온/오프라인 환경에서 모두 실습 진행합니다.)

Point 03
원격으로 로봇을 제어해볼 수 있는
Teleoperation 로봇 구현 파이널 프로젝트 실습
기구학, 궤적 생성, 제어 등 로봇 공학의 핵심 요소를 다른 로봇에 대입해 움직임의
안정성을 검증하는 텔레오퍼레이션 로봇 구현 프로젝트를 진행합니다.

Point 04
강사님과 직접 주고 받는
질의응답 커뮤니티
강의 수강 후 궁금한 점은 언제든 질문 가능한 질의응답 및 모방학습
개발 노하우를 얻어갈 수 있는 수강생 전용 커뮤니티 운영!
운영 기간(2025년 7월 4일 ~ 2028년 4월 27일)
로봇이 처음이어도 괜찮습니다.
로봇 공학의 기초를 완벽하게 끝내드립니다.


로봇 공학 학습을 위한
핵심 3가지 Check Point!
로봇의 핵심 구성 요소들을 배우고 해당 요소들이 어떻게 유기적으로
연결되어 있는지 직접 실습을 통해 학습합니다.
No 1. 로봇의 물리적 구조와 운동학의 개념을 학습할 수 있는 3가지 구성 요소 학습
로봇의 움직임을 수학적으로 모델링하고 다루는 방법을 학습합니다.
# Kinematics
# 좌표계
# 자유도(Degree of Freedom)
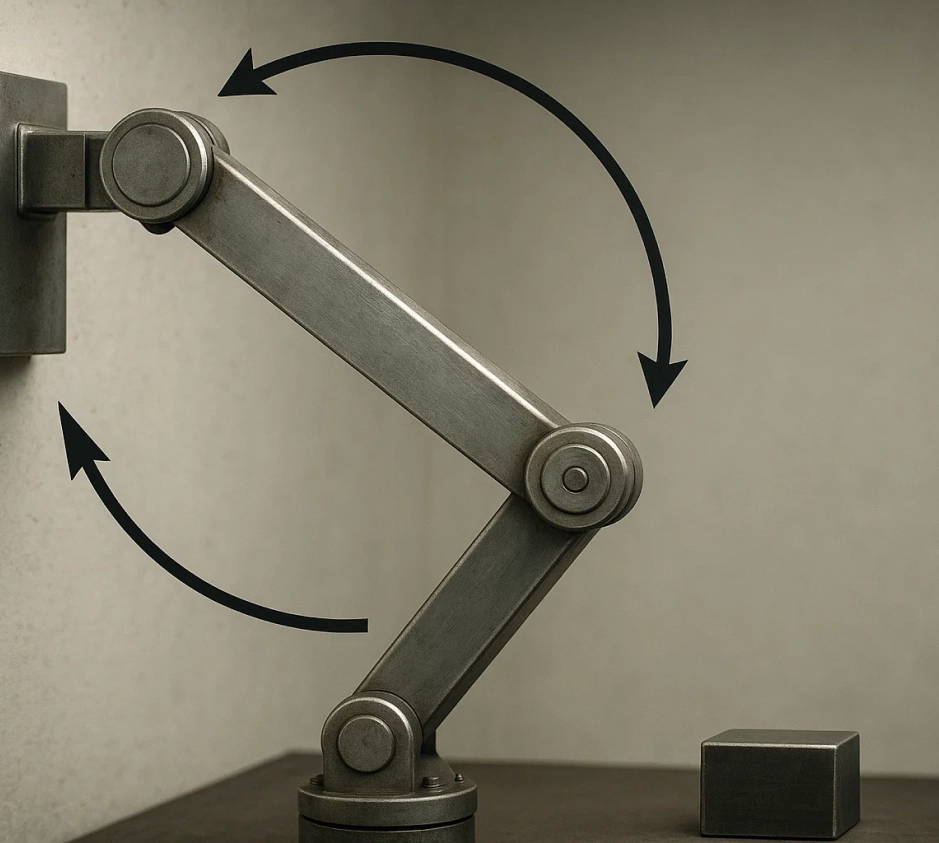
로봇 관절의 각도를 계산하는
Kinematics (FK, IK) 학습
로봇이 작업을 수행할 때 정확하게 원하는 위치와 자세로 “제어” 할 수 있는 방법을 학습합니다.
- 행렬과 삼각함수를 학습하고 로봇의 회전과 이동하는 원리를 학습합니다.
프로젝트 리스트 보기
- DH 파라미터를 활용하여 FK(정기구학)을 계산하는 방법을 학습합니다.
- IK(역기구학)를 학습하여 경로 계획의 원리와 궤적을 구성하는 방법을 학습합니다.
- (실습) 로봇팔 FK(정기구학)를 계산하고 작업 공간 경계를 탐색
- (실습) 목표 위치 입력에 따른 관절 각도 계산과 궤적을 생성
- (실습) 휴머노이드 보행 모션 생성
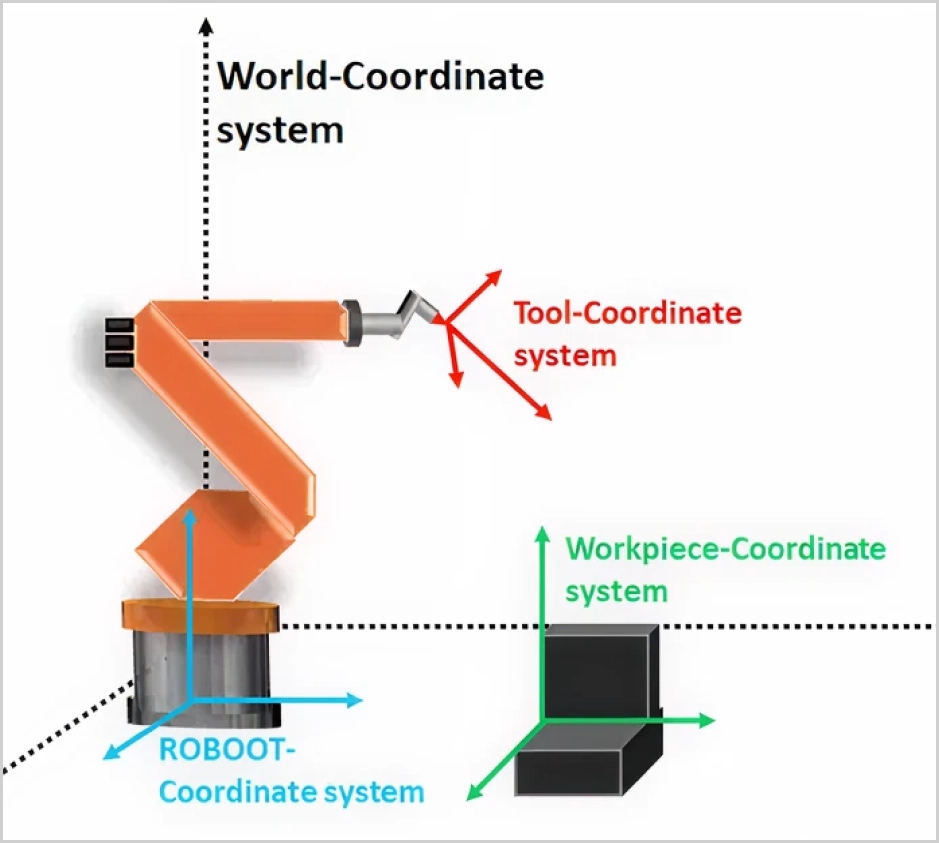
로봇의 위치와 자세를 수치적으로
표현하기 위한
좌표계 학습
로봇이 특정 작업을 수행할 때 작업 대상물의 위치를 계산하고 자유자재로 작업 대상물로 접근하기 위한 방법을 학습합니다.
- 로봇 환경에서 활용되는 대표 2가지 방식의 좌표계를 학습합니다. (Roll-Pitch-Yaw, Pan-Tilt-Swing)
프로젝트 리스트 보기
- (실습) 좌표계 변환 시각화
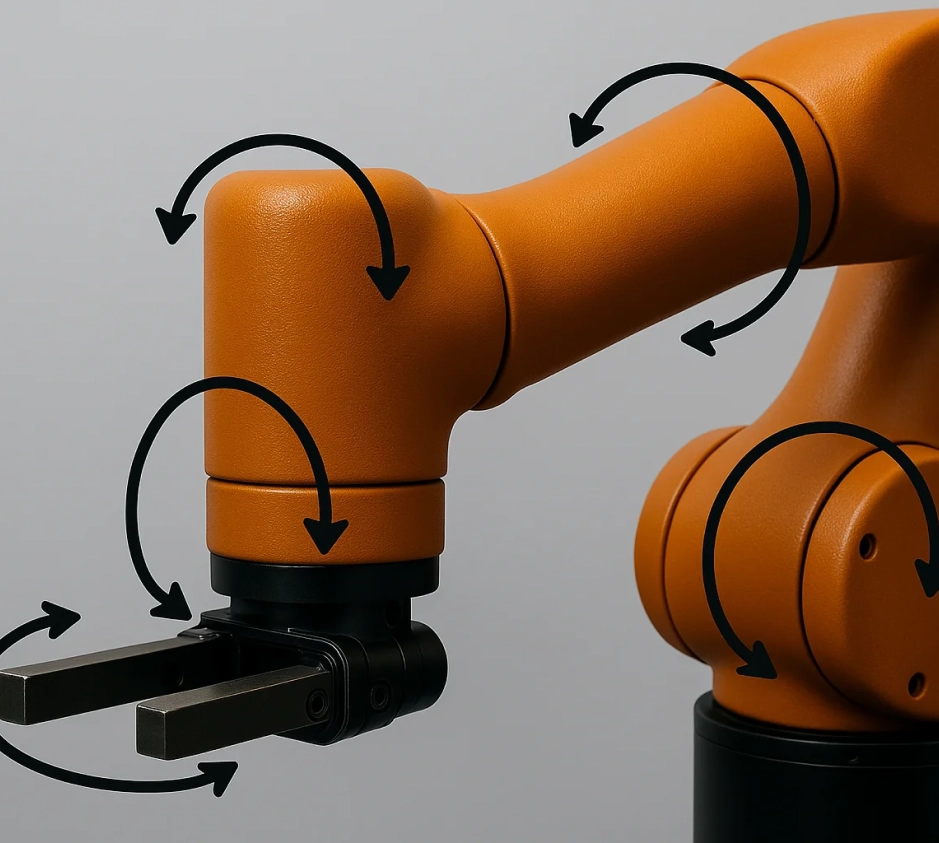
로봇이 움직일 수 있는 자유(위치 이동과 회전)의
정도를 수치로 표현하는
자유도(DoF) 학습
로봇 구조의 설계, 제어기, 기구학의 형태를 결정하는
로봇의 자유도의 개념을 학습합니다.
- 2 자유도 로봇과 6 자유도 로봇의 움직임을 비교하며 자유도 수치별 로봇 움직임의 차이를 학습합니다.
프로젝트 리스트 보기
- (실습) 3D 조작으로 로봇 자유도와 관절 유형 식별 프로젝트
No 2. 로봇의 실제 구동과 기초 수준의 제어를 학습할 수 있는 3가지 구성 요소 학습
로봇을 실제로 움직이게 만드는 힘과 그 힘을 정밀하게 다루는 방법을 학습합니다.
# 엑추에이터
# 모터
# PID 제어

로봇의 근육과도 같은
엑추에이터 로 실제
물리적인 움직임을 구현하는 방법 학습
제어 시스템의 명령에 따라 로봇의 팔, 다리, 손가락 등의
움직임을 조절할 수 있는 엑추에이터의 개념을 학습합니다.
- 모터, 서보, 공압 시스템 등 엑추에이터의 여러 유형을 학습합니다.
프로젝트 리스트 보기
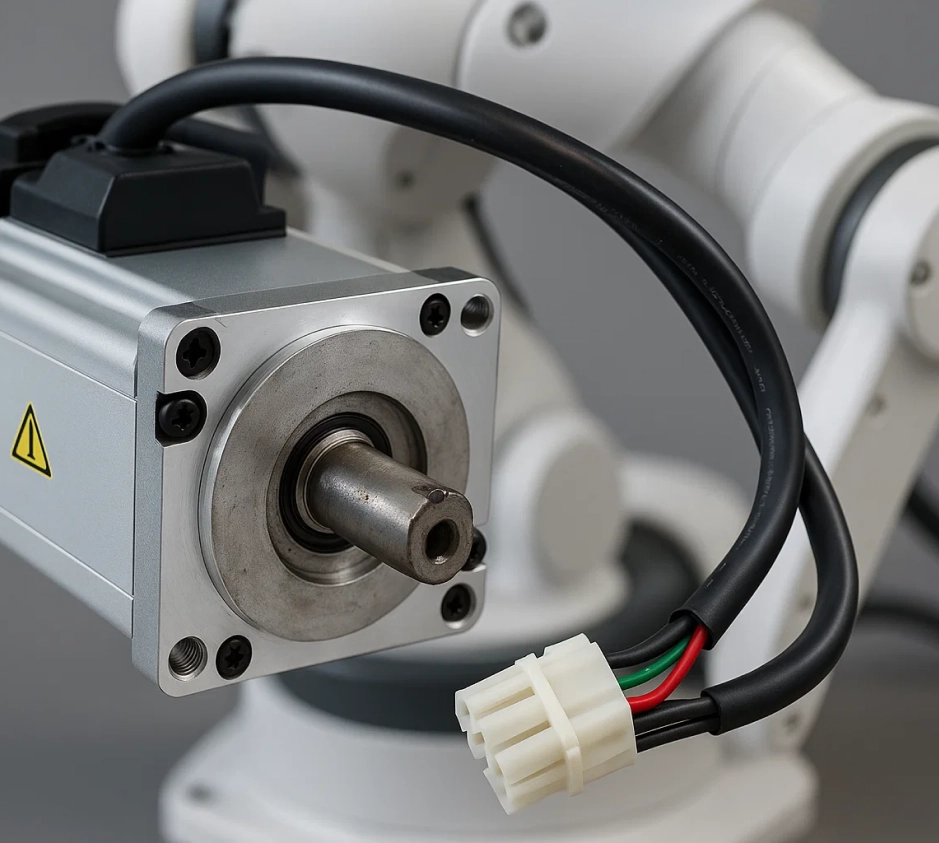
로봇이 의도한 대로 정밀한 동작을
구현할 수 있는
모터 학습
로봇의 물리적인 행동을 설계하고 제어하기 위한
모터의 개념을 학습합니다.
- 로봇에 활용되는 DC모터, 스탭모터, 서보모터의 개념을 학습하고 산업용 AC 모터와 구동 방식 차이점을 학습합니다.
프로젝트 리스트 보기
- (실습) 모터를 활용하여 3D Manipulator 동작
- (실습) Arduino Simulator로 모터 동작
- (실습) 다이나믹셀 위저드를 활용하여 세밀하게 모터를 제어
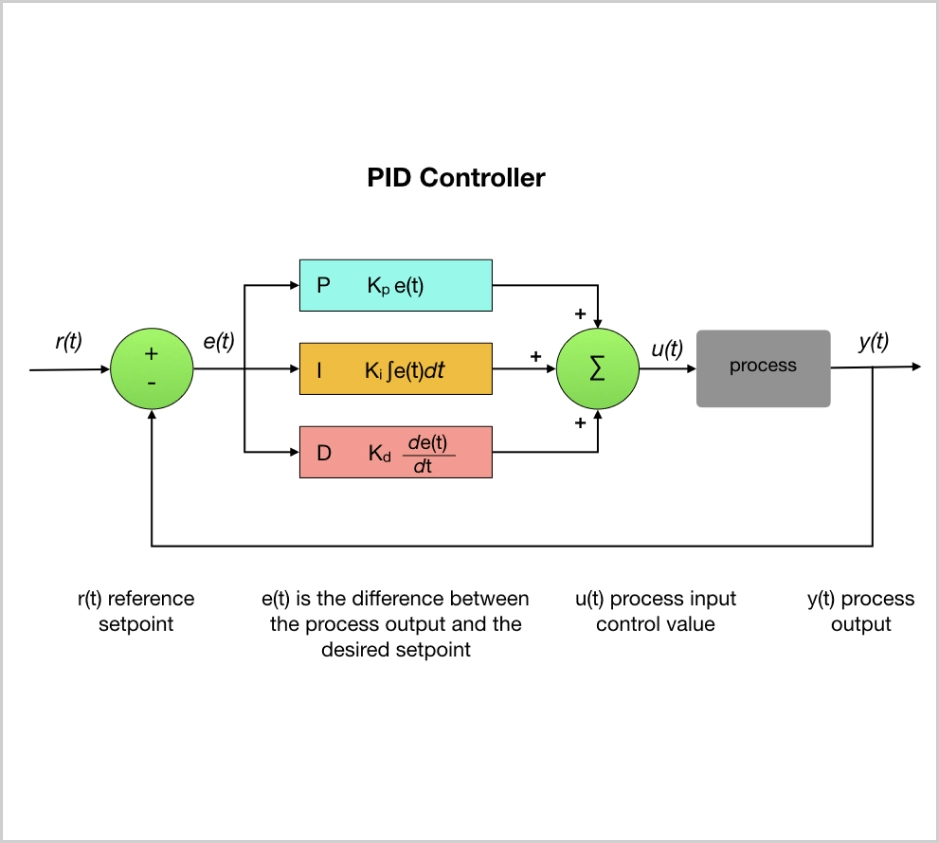
로봇이 작업을 수행할 때 목표 값과 실제 움직여야
하는 값의 오차를 줄이기 위한
PID 제어 학습
속도, 각도, 기울기, 일정한 힘 유지 등 다양한 형태의 로봇 행동을 제어 시 목표 값과 실제 움직여야 하는 값 과의 오차를 줄이는 방법을 학습합니다.
- 피드백 & 비례 & 적분 & 미분 제어의 개념을 학습합니다.
프로젝트 리스트 보기
- 다이나믹 셀을 적용하여 PID 제어 튜닝 방법을 학습합니다.
- (실습) 시뮬레이션 환경에서 모터를 제어하면서 PID 튜닝 적용 후 오차 값의 차이 전/후 차이 학습
No 3. 로봇의 인지 및 상태 추정의 개념을 이해할 수 있는 1가지 구성 요소 학습
로봇을 작업을 하기 위해 대상을 보고 인식하며 현재 상황을 추정할 수 있는지 파악하는 방법을 학습합니다.
# 센서 및 필터링

로봇이 작업을 수행할 때 작업 대상을
더 정확하게 인식하기 위한 센서 및 필터링 학습
더 정확하게 인식하기 위한 센서 및 필터링 학습
- 로보틱스에서 대표적으로 활용되는 자이로, 초음파, IR, LIDAR 등 여러 센서들의 개념과 활용 방법을 학습합니다.
- 필터링의 개념과 IMU 데이터를 해석하는 방법을 학습합니다.
- (실습) 센서 데이터 수집 및 필터링
- (실습) 필터링 전 후 달라진 센서 상태와 노이즈 분석
- 필터링의 개념과 IMU 데이터를 해석하는 방법을 학습합니다.
- (실습) 센서 데이터 수집 및 필터링
- (실습) 필터링 전 후 달라진 센서 상태와 노이즈 분석
온라인/오프라인 환경에서 모두 실습을 진행하고, 실제 하드웨어 로봇 장비의 경우 유로 구매가 필요합니다.
그러나 시뮬레이션 환경에서 강의 진행만으로도 학습 이해도에 지장은 없습니다.

5가지 형태의 로봇을 제어하면서
로봇 구동 방식 별 특징 학습
로봇의 대표 2가지 형태인 매니퓰레이터와 모바일 형태의
로봇을 제어해볼 수 있는 프로젝트 실습을 진행합니다.
OpenJigWare & Pybullet으로 시뮬레이션 제작 후 실제 로봇을 조립 및 제어하는 5개의 프로젝트 실습 구현
로봇 제어 실습 Project 1.
로봇 팔 제어 실습 프로젝트
로봇 시스템의 전반적인 흐름 속에서 로봇이 명령을 수행 받아 제어할 수 있는 원리를 학습합니다.

정보 흐름 블록 다이어그램과 시스템 아키텍쳐를
학습하면서 로봇 팔 제어 실습
학습하면서 로봇 팔 제어 실습
- 동작 계획, 제어 신호 등 다양한 형태의 데이터 흐름과 실시간으로
상호 작용하며 로봇을 제어하는 방법을 학습합니다.
- 역기구학 기반 Pick & Place 작업 경로를 계획하여 모터틀 제어하는
방법을 학습합니다.
상호 작용하며 로봇을 제어하는 방법을 학습합니다.
- 역기구학 기반 Pick & Place 작업 경로를 계획하여 모터틀 제어하는
방법을 학습합니다.
로봇 제어 실습 Project 2.
델타 로봇 제어 실습 프로젝트
산업 현장에서 높은 정밀도와 빠른 작업 수행이 가능한 델타 로봇의 구동 원리를 학습합니다.

고속 정밀 제어가 가능한 델타 로봇 팔 제어 실습
- 직렬 로봇과 병렬 로봇의 차이점을 학습하고 병렬 로봇의 일종인 델타 로봇의 구조를 학습합니다.
- 산업용 라인에서 부품 분류, 포장 등에 활용되는 로봇의 구조를 설계하고 Pick & Place Task로 제어하는 방법을 학습합니다.
- 산업용 라인에서 부품 분류, 포장 등에 활용되는 로봇의 구조를 설계하고 Pick & Place Task로 제어하는 방법을 학습합니다.
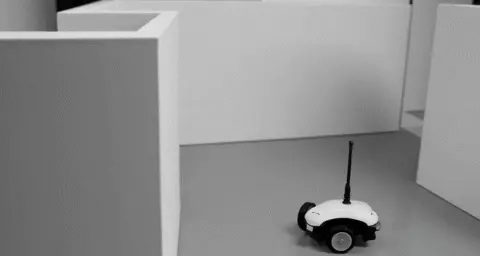
로봇 제어 실습 Project 3.
2바퀴 휠 로봇 구동 실습 프로젝트
휠 로봇의 기본적인 구동 구조를 학습하고 초기 형태의 경로 계획을 제어해볼 수 있는 방법을 학습합니다.

로봇의 휠 구조를 이해하고 경로 계획을 실제
모터 제어까지 확장해볼 수 있는 실습
모터 제어까지 확장해볼 수 있는 실습
- 바퀴 속도의 차이로 방향을 제어하며 단순한 형태의 Kinematics 모델링이 가능한 2바퀴 휠 로봇의 기초 구조를 학습합니다.
- Kinematics의 모델링으로 계산한 각 바퀴의 속도를 실제 모터 제어 신호로 변환하여 로봇을 제어해볼 수 있는 방법을 학습합니다.
- Kinematics의 모델링으로 계산한 각 바퀴의 속도를 실제 모터 제어 신호로 변환하여 로봇을 제어해볼 수 있는 방법을 학습합니다.
로봇 제어 실습 Project 4.
3바퀴 옴니 휠 로봇 구동 실습 프로젝트
전 방향 이동이 가능한 형태의 로봇 경로 계획을 제어해볼 수 있는 방법을 학습합니다.
바퀴의 원주 방향과 수직 방향 모두 자유롭게 이동 가능한
옴니 휠 로봇 구동 실습
옴니 휠 로봇 구동 실습
- 옴니휠의 키네마틱스 모델링을 위해 로봇의 x,y 축과 더불어 회전 속도를
조합하여 로봇에 필요한 속도를 계산해보는 방법을 학습합니다.
- 바퀴의 이동 방향과 회전 방향을 동시에 다루는 멀티태스킹
제어 방법을 학습합니다.
조합하여 로봇에 필요한 속도를 계산해보는 방법을 학습합니다.
- 바퀴의 이동 방향과 회전 방향을 동시에 다루는 멀티태스킹
제어 방법을 학습합니다.
로봇 제어 실습 Project 5.
4바퀴 메카넘 휠 로봇 구동 실습 프로젝트
물리 방향 마찰을 이용하여 모든 방향으로 힘을 생성해 로봇 경로 계획을 제어해볼 수 있는 방법을 학습합니다.

속도와 방향과 더불어 롤러의 미끄러짐까지 고려하여
로봇을 제어할 수 있는 메카넘 휠 로봇 구동 실습
로봇을 제어할 수 있는 메카넘 휠 로봇 구동 실습
- 4개의 각 바퀴를 동시에 정밀하게 제어하여 로봇의 이동 경로를
계산 및 구동해볼 수 있는 방법을 학습합니다.
- 지면 상태(마찰계수)에 따라 성능 차이가 발생할 수 있음을 확인하고
이를 고려하여 로봇을 제어하는 방법을 학습합니다.
계산 및 구동해볼 수 있는 방법을 학습합니다.
- 지면 상태(마찰계수)에 따라 성능 차이가 발생할 수 있음을 확인하고
이를 고려하여 로봇을 제어하는 방법을 학습합니다.
로봇이 부드럽고 정확하게 경로를 지나갈 수 있는 궤적 생성 프로젝트 실습
궤적 계획 설계 실습 Project.
여러 행태의 스플라인 곡선 기반 궤적 생성과 다중 경로 설계 실습 프로젝트
다양한 형태의 궤적 방식의 각 성능을 비교 분석하고 다중 경로 계획을 설계하는 실습을 구현합니다.
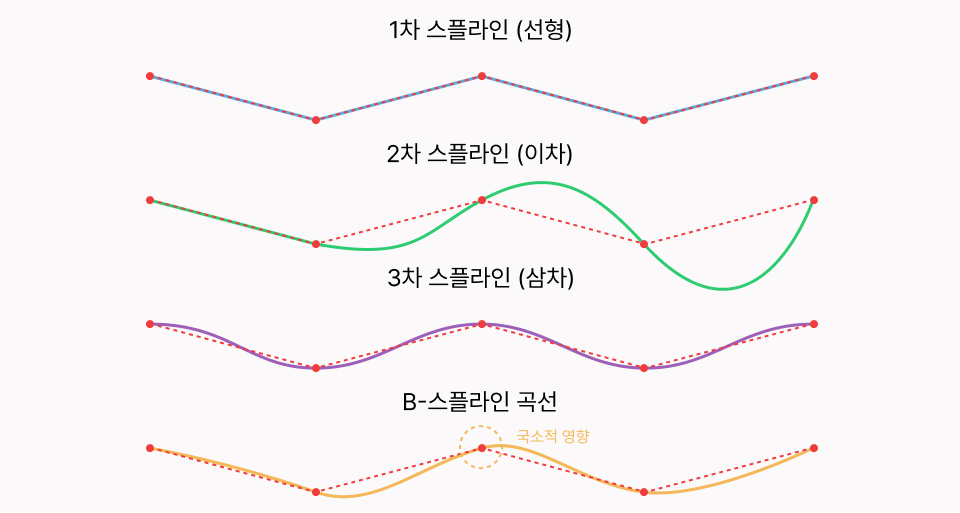
여러 형태의 궤적 생성으로 로봇 제어 상황에 따른 경로 설계 실습
- 곡선의 연속성과 제어 안정성 간의 상관 관계를 학습합니다.
- 스플라인의 로봇 제어 목적 별 선택 기준을 학습합니다.
- 실시간 환경 변화에 맞춰 대응 궤적을 생성하는 방법을 학습합니다.
- 스플라인의 로봇 제어 목적 별 선택 기준을 학습합니다.
- 실시간 환경 변화에 맞춰 대응 궤적을 생성하는 방법을 학습합니다.

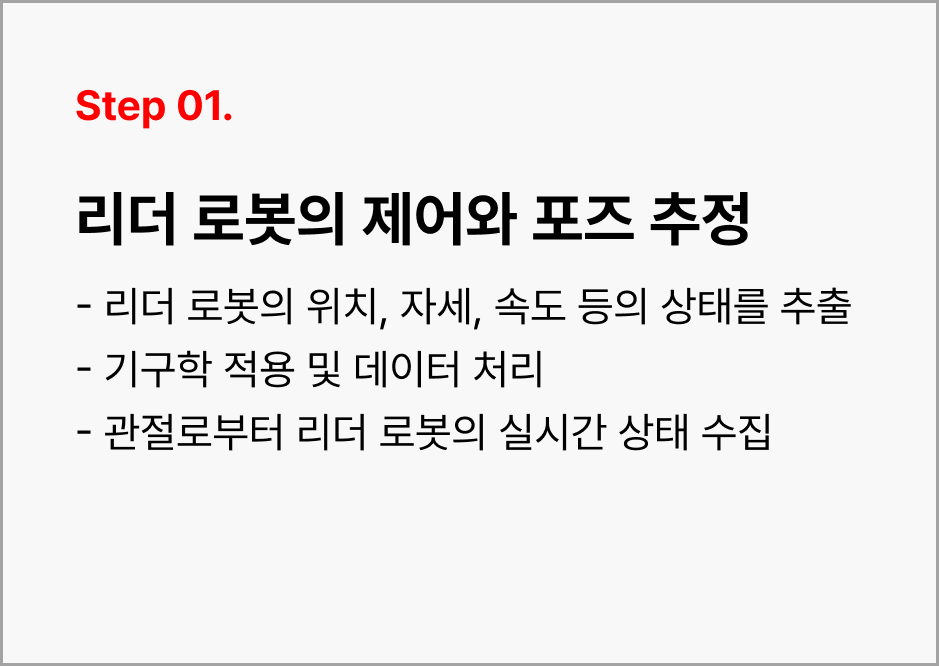
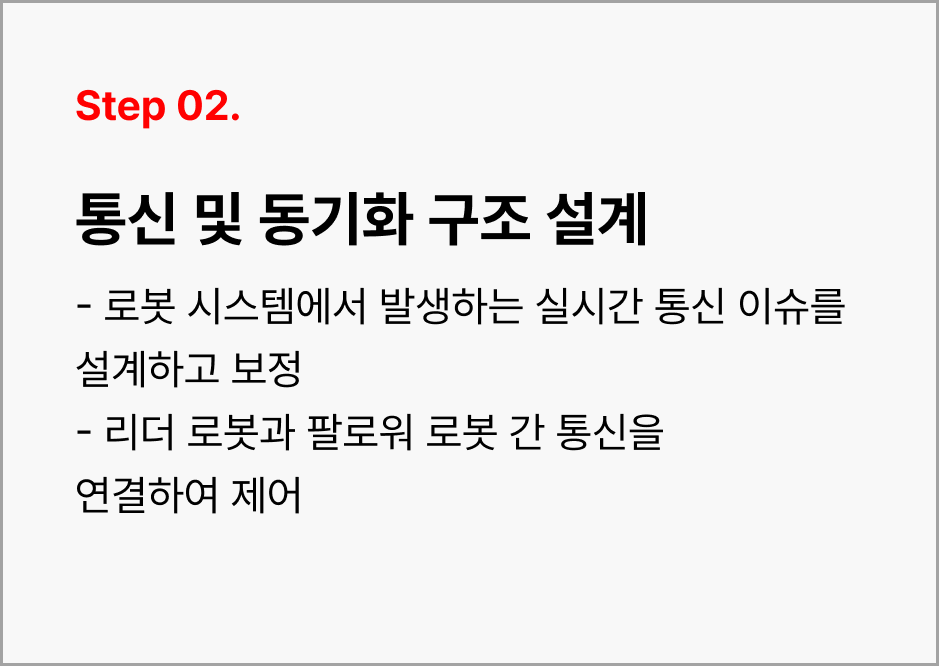
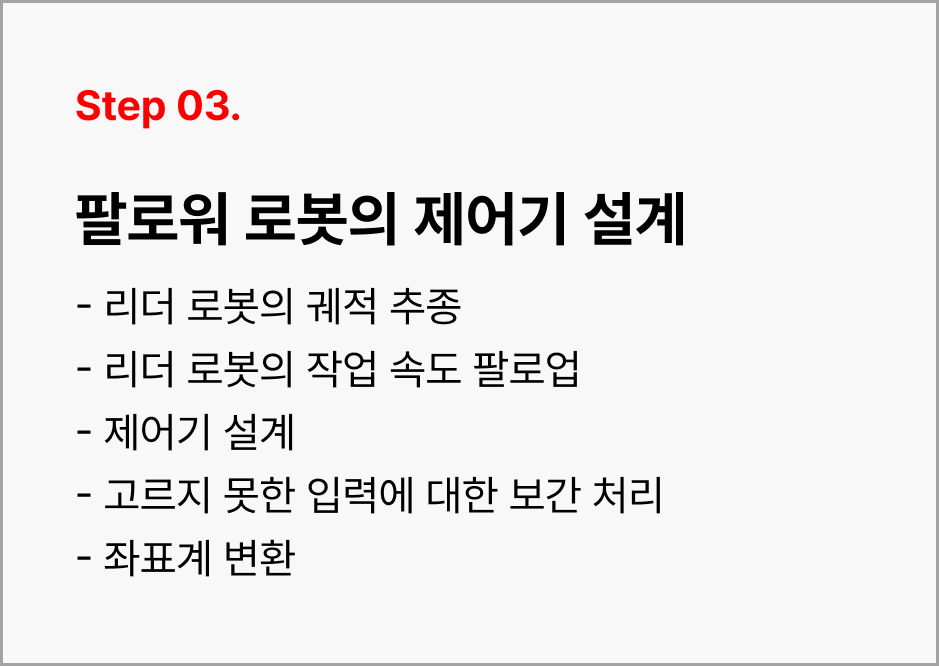
텔레오퍼레이션을 구현하는
파이널 프로젝트
먼 거리에서 로봇을 원격으로 구동할 수 있게 조작하는 텔레오퍼레이션
구현을 위해 리더와 팔로워 로봇을 구성하여 로봇 동작을 설계하는 방법을 학습합니다.

단체 구매 Benefit
잠깐, 3명 이상 구매 시 단체 할인이 가능해요.

오직 패스트캠퍼스에만 만나볼 수 있는
Special Benefit 2가지


수강생 한정 강의 관련 오픈 커뮤니티 질의응답까지!
강사님과 무한 질의응답이 가능합니다.
강사님과 무한 질의응답이 가능합니다.
1) 실습 중 에러가 나면? 질의응답 채널을 통해 빠른 해결!
2) 강의를 듣다가 이해되지 않는 부분이 생기면 바로 질문하세요!
* 강사님께서 직접 질문에 답변해주시는 기간은 2025년 7월 4일 ~ 2028년 5월 25일까지 운영되며
그 이후에는 패스트캠퍼스 AI 기능을 활용하여 질문에 답변 받으실 수 있습니다.
* 강사님이 현업 중 답변 하시기에 답변까지 영업일 기준 7일 내외 시간이 소요될 수 있습니다.
* 강의와 무관한 질문에 대해서는 답변이 필수로 제공되지 않습니다.
2) 강의를 듣다가 이해되지 않는 부분이 생기면 바로 질문하세요!
* 강사님께서 직접 질문에 답변해주시는 기간은 2025년 7월 4일 ~ 2028년 5월 25일까지 운영되며
그 이후에는 패스트캠퍼스 AI 기능을 활용하여 질문에 답변 받으실 수 있습니다.
* 강사님이 현업 중 답변 하시기에 답변까지 영업일 기준 7일 내외 시간이 소요될 수 있습니다.
* 강의와 무관한 질문에 대해서는 답변이 필수로 제공되지 않습니다.

한 번의 구매로 평생 소장!
언제든, 몇 번이든 다시!
언제든, 몇 번이든 다시!
한 번 결제로 평생 동안 무제한 반복 학습이 가능합니다.
바쁜 일정에 걱정할 필요 업싱, 원하는 때에 학습하고 필요할 때마다 복습하세요.
바쁜 일정에 걱정할 필요 업싱, 원하는 때에 학습하고 필요할 때마다 복습하세요.
- 로봇 공학의 기초가 부족한 로보틱스 연구 중인 학/석사 연구원
- 선수 지식 : C#, Python, Arduino 등과 같은 프로그래밍 언어의 기초 문법 지식
- 코드를 봤을 때 코드 의미를 이해하는 정도 실력만 되어도 수강에는 문제 없습니다.
- 선수 지식 : C#, Python, Arduino 등과 같은 프로그래밍 언어의 기초 문법 지식
- 코드를 봤을 때 코드 의미를 이해하는 정도 실력만 되어도 수강에는 문제 없습니다.
QUESTION 2
강의를 수강한 후 어떤 것들을
학습할 수 있을까요?
학습할 수 있을까요?
- 산업 현장에서 활용되는 로봇의 기초 뼈대 학습
- 강의에서 학습하는 로봇 설계 및 제어 기술을 활용하여 다양한 산업 환경에서 필요한
로봇 및 자동화 설비 설계와 운영에 직접 적용할 수 있는 방법을 학습하실 수 있습니다.
- 빠르게 시도해볼 수 있는 로봇 개발
- C# 및 RAD(Rapid Application Development)를 활용하여 로봇 개발을 하면서
필요한 라이브러리를 적용하여 빠르게 로봇을 개발해볼 수 있는 방법을 학습합니다.
- 강의에서 학습하는 로봇 설계 및 제어 기술을 활용하여 다양한 산업 환경에서 필요한
로봇 및 자동화 설비 설계와 운영에 직접 적용할 수 있는 방법을 학습하실 수 있습니다.
- 빠르게 시도해볼 수 있는 로봇 개발
- C# 및 RAD(Rapid Application Development)를 활용하여 로봇 개발을 하면서
필요한 라이브러리를 적용하여 빠르게 로봇을 개발해볼 수 있는 방법을 학습합니다.
QUESTION 3
강의 구매를 망설이시는 수강생들에게
해 주시고 싶은 한 마디가 있으시다면?
해 주시고 싶은 한 마디가 있으시다면?
전공자/대학원 수업 과정 외 로봇 공학을 기초부터 차근차근 배워 나가고 싶은데 어디서부터 시작해야 할 지 막막하시다면, 이 강의가 바로 당신의 출발점이 되어 줄 것입니다.
현업 로봇 엔지니어와 함께 실습 위주의 명확한 설명과 현장에서 바로 적용 가능한 기술들을 알려 드리면서 직관적으로 로봇 공학을 학습하실 수 있게 되실 것입니다.
QUESTION 4
개발 환경
- Windows 환경에서 실습 가능합니다.
- Visual Studio 2022 Community - C# Windows Forms App(.NET Framework)
설치 환경
- OpenJigWare 라이브러리 다운로드 및 dll 로드
- Python - Pybullet 3D Simulator
- Arduino IDE(OpenRB-150 라이브러리, OpenJigWare_A 라이브러리)
- 하드웨어 장비(유료)
- 공통 : 12V SMPS, OpenRB-150
- 2 Wheel : Dynamixel xc330_T288_T * 2
- 3 Wheel : Dynamixel xc330_T288_T * 3, Omniwheel * 3
- 4 Wheel : Dynamixel xc330_T288_T * 4, MecanumWheel * 4
- Manipulator : Dynamixel xc330_T288_T * 4
- Teleoperation : Dynamixel xc330_T288_T * 8
- Visual Studio 2022 Community - C# Windows Forms App(.NET Framework)
설치 환경
- OpenJigWare 라이브러리 다운로드 및 dll 로드
- Python - Pybullet 3D Simulator
- Arduino IDE(OpenRB-150 라이브러리, OpenJigWare_A 라이브러리)
- 하드웨어 장비(유료)
- 공통 : 12V SMPS, OpenRB-150
- 2 Wheel : Dynamixel xc330_T288_T * 2
- 3 Wheel : Dynamixel xc330_T288_T * 3, Omniwheel * 3
- 4 Wheel : Dynamixel xc330_T288_T * 4, MecanumWheel * 4
- Manipulator : Dynamixel xc330_T288_T * 4
- Teleoperation : Dynamixel xc330_T288_T * 8
커리큘럼
파트 5개클립 53개
영상공개 일정
해당 강의는 총 3회에 걸쳐 공개됩니다.
1차2025.07.04(금)
2차2025.08.01(금)
최종2025.08.29(금)
커뮤니티
수강생들은 어떤 질문을 하고, 어떤 이야기를 나누고 있을까요?
패스트캠퍼스 커뮤니티에서 다른 수강생들과 함께 궁금했던 주제에 대해 다양한 관점과 답변을 찾아보세요.
커뮤니티 바로가기학습 규정 및 환불 규정
학습 규정
* 본 상품은 동영상 형태의 강의를 수강하는 상품입니다.
* 상황에 따라 사전 공지 없이 할인이 조기 마감되거나 연장될 수 있습니다.
* 수강 신청 및 결제를 완료하시면, 마이페이지를 통해 바로 수강이 가능합니다.
총 학습기간:
정상 수강기간(유료 수강기간) 최초 30일, 무료 수강 기간은 31일 일차 이후로 무제한이며, 유료 수강기간과 무료 수강기간 모두 동일하게 시청 가능합니다.
본 패키지는 약 32시간 분량으로, 일 1시간 내외의 학습 시간을 통해 정상 수강 기간(=유료 수강 기간) 내에 모두 수강이 가능합니다.
수강시작일: 수강 시작일은 결제일로부터 기간이 산정되며, 결제를 완료하시면 마이페이지를 통해 바로 수강이 가능합니다. (사전 예약 강의는 1차 강의 오픈일)
패스트캠퍼스의 사정으로 수강시작이 늦어진 경우에는 해당 일정 만큼 수강 시작일이 연기됩니다.
일부 강의는 아직 모든 영상이 공개되지 않았습니다. 각 상세페이지 하단에 공개 일정이 안내되어 있습니다.
주의 사항
상황에 따라 사전 공지 없이 할인이 조기 마감되거나 연장될 수 있습니다.
천재지변, 폐업 등 서비스 중단이 불가피한 상황에는 서비스가 종료될 수 있습니다.
본 상품은 기수강생 할인, VIP CLUB 제도 (구 프리미엄 멤버십), 기타 할인 이벤트 적용이 불가할 수 있습니다.
커리큘럼은 제작 과정에서 일부 추가, 삭제 및 변경될 수 있습니다.
쿠폰 적용이나 프로모션 등으로 인해 5만원 이하의 금액으로 강의를 결제할 경우, 할부가 적용되지 않습니다.
환불 규정
환불금액은 정가가 아닌 실제 결제금액을 기준으로 계산됩니다.
쿠폰을 사용하여 강의를 결제하신 후 취소/환불 시 쿠폰은 복구되지 않습니다.
수강시작 후 7일 이내, 5강 미만 수강 시에는 100% 환불 가능합니다.
수강시작 후 7일 이내, 5강 이상 수강 시 전체 강의에서 수강한 강의의 비율에 해당하는 수강료를 차감 후 환불 가능합니다.
수강시작 후 7일 초과 시 정상 수강기간 대비 잔여일에 대해 아래 환불규정에 따라 환불 가능합니다.
환불요청일 시 기준
: 수강시작 후 1/3 경과 전, 실 결제금액의 2/3에 해당하는 금액 환불
: 수강시작 후 1/2 경과 전, 실 결제금액의 1/2에 해당하는 금액 환불
: 수강시작 후 1/2 경과 후, 환불 금액 없음
* 보다 자세한 환불 규정은 홈페이지 취소/환불 정책에서 확인 가능합니다.
[특별 구성] 로보틱스 개발을 위한 로봇 공학 패키지 주의사항 및 환불 규정
[학습규정 및 주의사항]
* 본 상품은 온라인 단과 강의를 묶어 추가 할인을 제공하는 패키지입니다.
* 이전에 개별/묶음 강의를 구매하셨더라도 차액 환불 등의 소급 적용은 불가합니다.
* 수강 신청 및 결제를 완료하시면, 마이페이지를 통해 바로 수강이 가능합니다.
* 묶음(패키지) 강의 내 일부 동일한 커리큘럼 또는 강의자료가 포함되어 있을 수 있으니, 개별 강의 상세페이지를 꼭 확인해 주세요.
* 일부 강의는 사전 예약 상품으로, 강의 영상이 공개 일정에 따라 순차적으로 제작되어 오픈됩니다.
* 수강시작일: 수강 시작일은 결제일로부터 기간이 산정되며, 결제를 완료하시면 마이페이지를 통해 바로 수강이 가능합니다. (사전 예약 강의는 1차 강의 오픈일)
* 패스트캠퍼스의 사정으로 수강시작이 늦어진 경우에는 해당 일정 만큼 수강 시작일이 연기됩니다.
* 대상 강의는 아래와 같습니다.
1) 로보틱스 개발을 위한 로봇 공학
2) 자율주행 로봇을 위한 ROS 2 & SLAM & Nav2 한번에 끝내기
총 학습기간 :
– 정상 수강기간(유료 수강기간) 최초 60일, 무료 수강 기간은 61일차 이후로 무제한이며, 유료 수강기간과 무료 수강기간 모두 동일하게 시청 가능합니다.
[패키지 환불 규정]
환불금액은 정가가 아닌 실제 결제금액을 기준으로 계산됩니다.
패키지 상품에 포함 된 강의 중 일부 강의만 환불이 불가합니다.
수강시작 후 7일 이내, 5강 미만 수강 시에는 100% 환불 가능합니다.
수강시작 후 7일 이내, 5강 이상 수강 시 전체 강의에서 수강한 강의의 비율에 해당하는 수강료를 차감 후 환불 가능합니다.
수강시작 후 7일 초과 시 각 패키지 상품 별 상단에 고지 된 '정상 수강기간' 대비 잔여일에 대해 아래 환불규정에 따라 환불 가능합니다.
환불요청일 시 기준
수강시작 후 1/3 경과 전, 실 결제금액의 2/3에 해당하는 금액 환불
수강시작 후 1/2 경과 전, 실 결제금액의 1/2에 해당하는 금액 환불
수강시작 후 1/2 경과 후, 환불 금액 없음
* 각 상품의 정상 수강기간은 위 강의 학습규정에서 확인할 수 있습니다.
* 본 상품은 패키지로 할인을 추가 적용하여 판매하므로, 강의 일부 환불은 불가능하며 위 기준에 따라 반영됩니다.
* 보다 자세한 환불 규정은 홈페이지 취소/환불 정책에서 확인 가능합니다.
패스트캠퍼스 정책 안내
[패스트캠퍼스 아이디 공유 금지 정책]
패스트캠퍼스의 모든 온라인 강의에서는 1개의 아이디로 여러명이 공유하는 형태를 금지하고 있습니다.
동시접속에 대한 기록은 내부 시스템을 통해 자동으로 누적되며, 이후 서비스 이용이 제한될 수 있습니다.
[기기제한 정책]
패스트캠퍼스 온라인 강의 시청을 위해서는 ID별 최대 4개의 기기를 등록할 수 있으며, 기기 등록은 온라인 강의장 접속 시 자동 등록됩니다.
최대 갯수를 초과하였을 경우 등록된 기기 해제가 필요합니다.
[저작권 정책]
패스트캠퍼스의 모든 강의는 무단 배포 및 가공하는 행위, 캡쳐 및 녹화하여 공유하는 행위, 무단으로 판매하는 행위 등 일체의 저작권 침해 행위를 금지합니다.
부정 사용이 적발될 경우 저작권법 위반에 의한 법적인 제재를 받으실 수 있습니다.
국내 7개 카드사 12개월 무이자 할부 지원! (간편 결제 제외)