Udacity NanoDegree
글로벌 인재들이 선택한 커리어 인증서
Udacity Nanodegree : 자율주행차량 기본이해

Udacity Nanodegree
: 자율주행차량 기본이해
자율주행차의 핵심 개념을 익히고, 실제 산업에서 활용되는 기술을 배울 수 있도록 설계된 입문 과정입니다.
Python과 C++ 프로그래밍을 익히고, 컴퓨터 비전과 머신 러닝의 기초를 다루며, 데이터를 활용한 자율주행차 알고리즘을 학습합니다.
베이지안 사고방식을 적용하여 불확실한 환경에서 자율주행차가 스스로 판단하는 원리를 배우고,
행렬 연산과 경로 계획 수립을 통해 보다 최적화된 주행이 가능하도록 설계된 프로세스를 익히게 됩니다.
이 과정을 마치면, 자율주행차 엔지니어링을 위한 기본기를 갖추고 고급 과정으로 나아갈 준비를 마칠 수 있습니다.
나노디그리
#자율주행
#컴퓨터비전
#딥러닝
#머신러닝
#위치추정 #객체감지
Udacity 나노디그리는 수료를 넘어, 실력 증명을 위한 가장 강력한 방법입니다.
전 세계 수많은 글로벌 인재들이 Udacity 나노디그리를 통해 실무 중심의 프로젝트를 성공적으로 수행하며, 업계가 요구하는 실전 역량을 갖춘 인재임을 입증하고 있습니다. 나노디그리는 단순한 학습의 결과물이 아닙니다. 현업에서 바로 통하는 실전 능력의 상징이며, 실리콘밸리와 글로벌 기업들이 주목하는 이유도 여기에 있습니다. 이 인증 하나만으로도, 당신은 단순히 ‘공부한 사람’이 아닌 ‘실제로 해낼 수 있는 사람’임을 증명할 수 있습니다. 이제 Udacity 나노디그리 수료증은 선택이 아닌, 당신의 가능성과 실력을 보여주는 필수 조건이 됩니다.
전 세계 수많은 글로벌 인재들이 Udacity 나노디그리를 통해 실무 중심의 프로젝트를 성공적으로 수행하며, 업계가 요구하는 실전 역량을 갖춘 인재임을 입증하고 있습니다. 나노디그리는 단순한 학습의 결과물이 아닙니다. 현업에서 바로 통하는 실전 능력의 상징이며, 실리콘밸리와 글로벌 기업들이 주목하는 이유도 여기에 있습니다. 이 인증 하나만으로도, 당신은 단순히 ‘공부한 사람’이 아닌 ‘실제로 해낼 수 있는 사람’임을 증명할 수 있습니다. 이제 Udacity 나노디그리 수료증은 선택이 아닌, 당신의 가능성과 실력을 보여주는 필수 조건이 됩니다.

 업계에서 인정하는 공식 수료 인증
- 실무 중심 커리큘럼을 성공적으로 이수한 분에게 공식 수료증 제공
업계에서 인정하는 공식 수료 인증
- 실무 중심 커리큘럼을 성공적으로 이수한 분에게 공식 수료증 제공- 글로벌 기업부터 스타트업까지 인정받는 교육 과정 완료 증명
 이력서 및 링크드인(LinkedIn) 프로필 활용
- 취업 및 커리어 증명을 위한 이력서, 포트폴리오, LinkedIn에 공식 수료증 추가 가능
이력서 및 링크드인(LinkedIn) 프로필 활용
- 취업 및 커리어 증명을 위한 이력서, 포트폴리오, LinkedIn에 공식 수료증 추가 가능- 채용 담당자에게 실무 프로젝트 경험을 증명할 수 있는 자료 제공
 취업 및 커리어 전환 기회 확대
- 실무 중심의 프로젝트 기반 학습을 통해 포트폴리오 완성 & 실전 경험 확보
취업 및 커리어 전환 기회 확대
- 실무 중심의 프로젝트 기반 학습을 통해 포트폴리오 완성 & 실전 경험 확보- Udacity 커뮤니티 및 파트너사를 통한 취업 추천 및 네트워킹 기회 제공
 커리어 코칭
- 개인 목표에 맞춘 커리어 상담 및 로드맵 제공
커리어 코칭
- 개인 목표에 맞춘 커리어 상담 및 로드맵 제공- 이력서 리뷰 등 취업을 위한 실질적 코칭 제공
Info.
학습 안내
학습 안내
실무 중심의 프로젝트 기반 학습을 통해 가장 최신의 기술을 습득하고,
업계 전문가의 멘토링을 받으며 실제 기업 환경에서 적용 가능한 역량을
갖추세요. 탄탄한 이론 학습과 함께 실습을 병행하며,
전 세계 전문가들과 함께 성장할 기회를 만나보세요.
업계 전문가의 멘토링을 받으며 실제 기업 환경에서 적용 가능한 역량을
갖추세요. 탄탄한 이론 학습과 함께 실습을 병행하며,
전 세계 전문가들과 함께 성장할 기회를 만나보세요.
기본 학습 정보 총 학습 시간 : 4개월 (주 10시간 학습기준)
학습 방식 : 프로젝트 + 온라인 VOD
학습 난이도 & 필요 역량 난이도 : 중급
사전지식 필요 : 프로그래밍 기초(Python 등), 대수학
학습 환경 및 실습방식 - Udacity 및 패스트캠퍼스 온라인 강의장
- 클라우드 기반 Workspace에서 프로젝트 진행
- 실제 기업 데이터셋을 활용한 프로젝트 진행
멘토링 & 피드백 지원 - 현업 전문가의 1:1 맞춤형 피드백
- 24시간 이내의 QnA 답변
- AI를 활용한 실시간 질의응답
- 학습 커뮤니티 지원
Intro to
Self Driving Cars.
자율주행차량 기본이해 프로그램
Self Driving Cars.
자율주행차량 기본이해 프로그램
자율주행 기술은 더 이상 먼 미래의 이야기가 아닙니다. 스마트 모빌리티, 물류 자동화, 교통 시스템 혁신 등 다양한 분야에서 빠르게 발전하며, 이를 실현할 인재에 대한 수요도 높아지고 있습니다. 하지만 단순한 개념 학습만으로는 자율주행 기술을 이해하고 활용하기 어렵습니다. Python, C++, 선형 대수, 머신러닝, 컴퓨터 비전 등 다양한 기술을 유기적으로 결합해야만 완전한 자율주행 시스템을 구현할 수 있기 때문입니다.
Udacity의 ‘자율주행차 기본 이해’ 과정은 자율주행 기술을 처음 접하는 학습자를 위해 이론과 실습을 균형 있게 배울 수 있도록 설계되었습니다. 베이지안 사고방식, 경로 계획, 컴퓨터 비전 등 핵심 개념을 배우고, Python과 C++을 활용한 실제 프로젝트를 수행하며 실전 감각을 익힐 수 있습니다.
단순히 개념을 배우는 것이 아닙니다. 주어진 데이터를 바탕으로 차량의 위치를 추정하고, 최적의 경로를 찾으며, 객체를 인식하는 등 자율주행 기술의 핵심 요소를 직접 구현해볼 수 있습니다. 누구나 도전할 수 있으며, 이 과정을 통해 자율주행 기술의 세계로 한 걸음 더 나아갈 수 있습니다.
Udacity의 ‘자율주행차 기본 이해’ 과정은 자율주행 기술을 처음 접하는 학습자를 위해 이론과 실습을 균형 있게 배울 수 있도록 설계되었습니다. 베이지안 사고방식, 경로 계획, 컴퓨터 비전 등 핵심 개념을 배우고, Python과 C++을 활용한 실제 프로젝트를 수행하며 실전 감각을 익힐 수 있습니다.
단순히 개념을 배우는 것이 아닙니다. 주어진 데이터를 바탕으로 차량의 위치를 추정하고, 최적의 경로를 찾으며, 객체를 인식하는 등 자율주행 기술의 핵심 요소를 직접 구현해볼 수 있습니다. 누구나 도전할 수 있으며, 이 과정을 통해 자율주행 기술의 세계로 한 걸음 더 나아갈 수 있습니다.
필수 사항 다음 중 한개의 환경에서 학습을 권장합니다.
✓ PC : 최신 업데이트가 설치된 Windows 7 이상 (Internet Explorer는 지원되지 않음)
✓ Mac : 최신 업데이트가 설치된 OS X 10.11 이상.
✓ Linux : 지원되는 브라우저가 설치된 최신 모든 최신 배포판.
✓ 우분투 : 17.10+ 또는 14.04 LTS+.
Overview.
한눈에 보기
한눈에 보기
Fast campus와 함께하는 Udacity 나노디그리, 이렇게 다릅니다.
가장 최신의, 그리고 최고의 학습 경험을 통해 즉시 실무 투입 가능한 수준으로
레벨업해보세요.
가장 최신의, 그리고 최고의 학습 경험을 통해 즉시 실무 투입 가능한 수준으로
레벨업해보세요.
-
POINT 1
글로벌 기업과 공동 설계한
실무형 커리큘럼
구글, 아마존, 마이크로소프트 등 글로벌 기업과 협력하여 실무에서 바로 활용할 수 있는 최신 기술과 트렌드를 반영한 커리큘럼을 제공합니다. -
POINT 2
100% 한글로
학습하는 나노디그리
강의, 실습, 멘토링, 학습자료까지 100% 한글 콘텐츠로 제공합니다. 언어 장벽 없이 최신, 최고의 기술을 편안하게 학습할 수 있습니다. -
POINT 3
실제 기업 데이터로
해결하는 실전 프로젝트
구글, BMW, 페이스북 등 글로벌 기업의 실제 데이터셋을 활용하여, 단순 예제가 아닌 기업이 원하는 실전 문제 해결 능력을 기를 수 있습니다.
-
POINT 4
최신 트렌드 반영
& 지속적인 업데이트
빠르게 변화하는 비즈니스 및 기술 트렌드를 반영하여 강의 내용 및 자료, 실습까지 가장 최신의 콘텐츠로 학습합니다. -
POINT 5
글로벌 현직 전문가가 제공하는
1:1 무제한 피드백 & 질의응답
실제 글로벌 기업의 전문가들이 1:1로 프로젝트 피드백 & 질의응답을 제공하여 원하는 실무 수준까지 성장할 수 있도록 지원합니다. -
POINT 6
고사양 PC 필요없이,
실제 현장과 같은 환경에서 실습
클라우드 기반 실습 환경으로, 설치 과정과 비용 걱정 없이 즉시 실습이 가능합니다. 업계 표준 업무 환경에서 실무 경험을 쌓을 수 있습니다.
-
POINT 7
Udacity Nanodegree
수료증 & 취업지원
나노디그리 제공으로 글로벌 기업에서도 인정받을 수 있습니다. 또한 이력서 첨삭 및 포트폴리오 구성까지 지원하여 취업과 이직을 돕습니다. -
POINT 8
패스트캠퍼스 평생 수강
강의 제공
나노디그리 수료 외에도 우리의 배움은 멈추면 안되기에, 실무수준의 콘텐츠를 언제나 배우고 학습할 수 있도록 평생소장 콘텐츠를 제공합니다. -
POINT 9
함께 성장하는
커뮤니티
혼자 공부하는 것이 아닌, 같은 목표를 가진 학습자들과 소통합니다. 양질의 콘텐츠를 교류하여 지속적인 동기부여 및 네트워킹이 가능합니다.
Curriculums.
교육 과정
교육 과정
Udacity 나노디그리는 PBL(Project-Based Learning) 방식을 채택하여,
각 단계별 실무 프로젝트를 수행하며 핵심 이론을 학습합니다.
실제 기업의 데이터셋을 기반으로 업계에서 검증된 기술을 익히며,
현업에서 즉시 활용가능한 문제해결 능력 및 역량을
갖출 수 있는 커리큘럼으로 설계되었습니다.
각 단계별 실무 프로젝트를 수행하며 핵심 이론을 학습합니다.
실제 기업의 데이터셋을 기반으로 업계에서 검증된 기술을 익히며,
현업에서 즉시 활용가능한 문제해결 능력 및 역량을
갖출 수 있는 커리큘럼으로 설계되었습니다.
↔ 밀어서 보기

베이지안 사고
Bayesian Thinking
1개 프로젝트 3주
Bayesian Thinking
1개 프로젝트 3주
자율주행차는 주변 환경을 이해하고, 주어진 데이터를 기반으로 미래를
예측해야 합니다. 하지만 센서 데이터는 항상 정확하지 않으며,
변동성이 크기 때문에 신뢰할 수 없는 데이터를 활용해 최적의 결정을 내리는
능력이 필수적입니다.이 과정에서는 베이지안 추(Bayesian Inference)을
기반으로 자율주행차가 자신의 위치를 정확하게 추정하고(현지화, Localization), 주변 교통 상황을 예측하는 방법을 배웁니다.
학습을 마치면, 베이지안 사고방식을 활용하여 데이터를 해석하고,
불확실한 환경에서도 최적의 판단을 내리는 능력을 갖추게 됩니다.
예측해야 합니다. 하지만 센서 데이터는 항상 정확하지 않으며,
변동성이 크기 때문에 신뢰할 수 없는 데이터를 활용해 최적의 결정을 내리는
능력이 필수적입니다.이 과정에서는 베이지안 추(Bayesian Inference)을
기반으로 자율주행차가 자신의 위치를 정확하게 추정하고(현지화, Localization), 주변 교통 상황을 예측하는 방법을 배웁니다.
학습을 마치면, 베이지안 사고방식을 활용하여 데이터를 해석하고,
불확실한 환경에서도 최적의 판단을 내리는 능력을 갖추게 됩니다.
Real-world Project ➊
: Python을 활용한 2D 히스토그램 필터
: Python을 활용한 2D 히스토그램 필터
학습 목표
- 베이지안 사고방식을 활용한 데이터 분석 및 예측
- 자율주행차의 위치 추정(로컬라이제이션) 원리 학습
- Python을 활용한 2D 히스토그램 필터 구현
- 확률적 접근 방식을 이용한 의사결정 기법 익히기
핵심 기술
- 확률 기반 로컬라이제이션(위치 추정) 알고리즘
- 베이지안 확률 모델을 활용한 데이터 분석
- Python을 사용한 확률 분포 및 데이터 처리
- 센서 데이터를 활용한 이동 예측 및 환경 인식
- 베이지안 사고방식을 활용한 데이터 분석 및 예측
- 자율주행차의 위치 추정(로컬라이제이션) 원리 학습
- Python을 활용한 2D 히스토그램 필터 구현
- 확률적 접근 방식을 이용한 의사결정 기법 익히기
핵심 기술
- 확률 기반 로컬라이제이션(위치 추정) 알고리즘
- 베이지안 확률 모델을 활용한 데이터 분석
- Python을 사용한 확률 분포 및 데이터 처리
- 센서 데이터를 활용한 이동 예측 및 환경 인식
이론 자세히 보기
1과
베이지안 사고와 확률의 기초
- 확률과 로봇 공학의 관계 이해
- 베이지안 간섭을 활용한 데이터 해석
2과
시뮬레이션 차량 제어
- 가상의 차량을 프로그래밍하여 주행 테스트
- 스로틀(Throttle) 및 조향(Steering) 명령을 통한 차량 제어
3과
확률 및 조건부 확률
- 확률 이론과 자율주행차에서의 활용 사례 학습
- 센서 데이터의 신뢰도를 높이기 위한 조건부 확률 개념 이해
4과
Python을 활용한 확률 모델링
분류
- Python을 사용한 확률 이론 실습
- 센서 데이터 기반 확률 분석 및 시뮬레이션
5과
베이즈 정리와 로봇 로컬라이제이션
- 베이즈 정리를 활용한 차량 위치 추정(Localization)
- 자율주행차의 환경 인식을 위한 확률 모델 적용
6과
Python을 활용한 2D 히스토그램 필터 구현
- sense 및 move 함수 작성하여 차량 위치 추정
- 확률적 접근 방식을 사용한 이동 예측 및 환경 분석

행렬과 객체 지향 프로그래밍
행렬과 객체 지향 프로그래밍
1개 프로젝트 2주
행렬과 객체 지향 프로그래밍
1개 프로젝트 2주
자율주행차 엔지니어에게 필수적인 객체 지향 프로그래밍(OOP)과
선형 대수학(Linear Algebra)을 배우는 과정입니다.
객체 지향 프로그래밍은 자동차의 상태를 코드로 모델링하고 제어하는 데
필수적인 기술이며, 선형 대수학은 칼만 필터(Kalman Filter)와
같은 차량 추적 알고리즘을 이해하고 구현하는 데 활용됩니다.
이 과정에서는 OOP 개념을 익히고 행렬 연산을 프로그래밍적으로 다루는 방법을 학습하며, 자율주행 시스템에서 활용되는 핵심 기술을 실습합니다.
선형 대수학(Linear Algebra)을 배우는 과정입니다.
객체 지향 프로그래밍은 자동차의 상태를 코드로 모델링하고 제어하는 데
필수적인 기술이며, 선형 대수학은 칼만 필터(Kalman Filter)와
같은 차량 추적 알고리즘을 이해하고 구현하는 데 활용됩니다.
이 과정에서는 OOP 개념을 익히고 행렬 연산을 프로그래밍적으로 다루는 방법을 학습하며, 자율주행 시스템에서 활용되는 핵심 기술을 실습합니다.
Real-world Project ➋
: 행렬 클래스 구현하기
: 행렬 클래스 구현하기
학습 목표
- 객체 지향 프로그래밍(OOP) 개념과 클래스 활용법 익히기
- 선형 대수학과 행렬 연산의 기초 이해
- Python을 활용한 행렬 연산 및 데이터 변환 구현
핵심 기술
- 객체 지향 프로그래밍(OOP) - 클래스, 메서드, 상속 개념 활용
- 행렬 연산(덧셈, 곱셈, 전치, 역행렬 등) 구현
- 선형 대수학을 활용한 데이터 변환 및 최적화
- Python을 활용한 행렬 기반 알고리즘 구현
- 객체 지향 프로그래밍(OOP) 개념과 클래스 활용법 익히기
- 선형 대수학과 행렬 연산의 기초 이해
- Python을 활용한 행렬 연산 및 데이터 변환 구현
핵심 기술
- 객체 지향 프로그래밍(OOP) - 클래스, 메서드, 상속 개념 활용
- 행렬 연산(덧셈, 곱셈, 전치, 역행렬 등) 구현
- 선형 대수학을 활용한 데이터 변환 및 최적화
- Python을 활용한 행렬 기반 알고리즘 구현
이론 자세히 보기
1과
강의 개요 및 개념 소개
- 이번 과정에서 다루는 도구와 알고리즘 개요
2과
칼만 필터의 개념과 응용
- 차량 추적 알고리즘인 칼만 필터의 기본 개념 학습
- 1차원 칼만 필터 구현을 통해 이해 심화
3과
상태(State)와 객체 지향 프로그래밍(OOP)
- 자동차의 상태(State)를 프로그래밍적으로 표현하는 방법
- 객체 지향 프로그래밍(OOP)을 활용한 차량 모델링
4과
행렬 연산과 상태 변환
- 선형 대수학에서 활용되는 행렬 연산 학습
- 다차원 칼만 필터를 위한 행렬 변환 연산 이해
5과
Python을 활용한 행렬 클래스 구현
- 부분적으로 완성된 Matrix 클래스의 메서드 작성
- 객체 지향 프로그래밍과 선형 대수학을 결합한 코드 작성

Python에서 C++로 변환
Python에서 C++로 변환
1개 프로젝트 2주
Python에서 C++로 변환
1개 프로젝트 2주
C++는 자율주행차 개발에서 널리 사용되는 언어로, 빠른 실행 속도와 높은 성능을 제공합니다. 이 과정에서는 Python으로 작성된 코드를 C++로 변환하는 실습을 통해 C++의 기본 개념과 문법을 익히는 것이 목표입니다. Python과 C++의 차이를 이해하고, 벡터(Vector) 및 객체 지향 프로그래밍(OOP) 개념을 활용하여 보다 최적화된 코드를 작성하는 방법을 학습합니다.
Real-world Project ➌
: Python을 C++로 번역하기
: Python을 C++로 번역하기
학습 목표
- Python과 C++의 문법적 차이 이해 및 코드 변환
- C++ 벡터(Vector) 활용법 익히기
- C++ 프로그램 작성 및 실행 파일(Executable) 생성하기
- C++ 객체 지향 프로그래밍(OOP) 기초 학습
- Python과 C++ 코드 실행 속도 비교
핵심 기술
- C++ 문법 및 기본 구문
- C++ 벡터(Vector) 활용 및 행렬 연산
- C++ 코드 컴파일 및 실행 파일 생성
- C++ 객체 지향 프로그래밍(OOP)
- Python과 C++의 실행 성능 비교
- Python과 C++의 문법적 차이 이해 및 코드 변환
- C++ 벡터(Vector) 활용법 익히기
- C++ 프로그램 작성 및 실행 파일(Executable) 생성하기
- C++ 객체 지향 프로그래밍(OOP) 기초 학습
- Python과 C++ 코드 실행 속도 비교
핵심 기술
- C++ 문법 및 기본 구문
- C++ 벡터(Vector) 활용 및 행렬 연산
- C++ 코드 컴파일 및 실행 파일 생성
- C++ 객체 지향 프로그래밍(OOP)
- Python과 C++의 실행 성능 비교
이론 자세히 보기
1과
C++ 기초 및 코드 작성 방법
- Python과 C++의 차이 이해 및 기본 코드 작성
2과
C++ 벡터(Vector) 활용법
- Python 리스트와 C++ 벡터 비교 및 실습
3과
C++ 코드 컴파일 및 실행
- C++ 프로그램을 컴파일하고 실행 파일 생성하기
4과
C++ 객체 지향 프로그래밍(OOP) 개념
- 클래스, 상속, 캡슐화 등 OOP의 기본 개념 학습
5과
Python과 C++의 실행 속도 비교
- 두 언어의 실행 속도 분석 및 최적화 방법 이해
6과
Python을 C++로 변환하기
- 히스토그램 필터 코드의 C++ 변환 및 최적화

고성능 C++ 프로그래밍
고성능 C++ 프로그래밍
1개 프로젝트 2주
고성능 C++ 프로그래밍
1개 프로젝트 2주
자율주행차의 시스템은 단 한 번의 지연도 허용되지 않는 환경에서 작동해야
합니다. 이 과정에서는 단순히 올바르게 실행되는 코드가 아니라,
더 빠르고 최적화된 C++ 코드를 작성하는 방법을 배웁니다.
특히, CPU와 메모리의 작동 방식을 이해하고 실행 속도를 높이는 최적화
기법을 익히면서, 자율주행 시스템과 같은 고성능이 요구되는 환경에서
효율적인 프로그래밍을 실습합니다.C++의 저수준 기능을 활용하여
성능을 향상시키는 것이 핵심이며, 불필요한 연산을 제거하고
최적의 실행 경로를 찾는 기술을 배웁니다. 학습을 마치면,
코드 성능을 분석하고 병목 구간을 최적화하는 능력을 갖추게 됩니다.
합니다. 이 과정에서는 단순히 올바르게 실행되는 코드가 아니라,
더 빠르고 최적화된 C++ 코드를 작성하는 방법을 배웁니다.
특히, CPU와 메모리의 작동 방식을 이해하고 실행 속도를 높이는 최적화
기법을 익히면서, 자율주행 시스템과 같은 고성능이 요구되는 환경에서
효율적인 프로그래밍을 실습합니다.C++의 저수준 기능을 활용하여
성능을 향상시키는 것이 핵심이며, 불필요한 연산을 제거하고
최적의 실행 경로를 찾는 기술을 배웁니다. 학습을 마치면,
코드 성능을 분석하고 병목 구간을 최적화하는 능력을 갖추게 됩니다.
Real-world Project ➍
: 히스토그램 필터 최적화
: 히스토그램 필터 최적화
학습 목표
- CPU와 메모리 구조를 이해하고 C++ 최적화 기법 적용
- 실행 속도를 저하시킬 수 있는 요소를 분석하고 해결하기
- 고성능 코드 작성을 위한 C++의 저수준 기능 활용
- 코드 실행 속도 개선을 위한 프로파일링 및 디버깅 실습
핵심 기술
- C++의 저수준 언어 기능을 활용한 최적화
- 메모리 관리 및 CPU 캐시 활용 기법
- 프로파일링을 통한 코드 성능 분석
- 실행 속도를 높이기 위한 효율적인 알고리즘 적용
- CPU와 메모리 구조를 이해하고 C++ 최적화 기법 적용
- 실행 속도를 저하시킬 수 있는 요소를 분석하고 해결하기
- 고성능 코드 작성을 위한 C++의 저수준 기능 활용
- 코드 실행 속도 개선을 위한 프로파일링 및 디버깅 실습
핵심 기술
- C++의 저수준 언어 기능을 활용한 최적화
- 메모리 관리 및 CPU 캐시 활용 기법
- 프로파일링을 통한 코드 성능 분석
- 실행 속도를 높이기 위한 효율적인 알고리즘 적용
이론 자세히 보기
1과
C++ 벡터(Vector) 활용법
- C++ 프로그램의 실행 과정과 최적화 원리 이해
- CPU와 RAM이 코드를 처리하는 방식 학습
- 성능 저하를 유발하는 주요 요소 분석 및 개선 방법 익히기
2과
C++ 최적화 실습
- C++ 코드의 실행 속도를 높이기 위한 최적화 기법 학습
- 불필요한 연산을 제거하여 코드 효율성 향상
- 성능 병목 현상을 파악하고 최적화 전략 적용

데이터 구조 및 경로 계획
Data Structures & Path Planning
1개 프로젝트 2주
Data Structures & Path Planning
1개 프로젝트 2주
자율주행차는 매 순간 복잡한 결정을 내려야 합니다.
차량과 도로의 관계를 어떻게 모델링할지, 최적의 경로를 찾기 위해
어떤 알고리즘을 사용할지 등은 자율주행차 엔지니어들이
매일 해결해야 하는 문제입니다. 이 과정에서는 자율주행 시스템에서
가장 많이 사용되는 데이터 구조와 고리즘을 배우고,
실제 문제 해결에 적용하는 방법을 익힙니다. 특히, 그래프 데이터 구조와
검색 알고리즘을 활용하여 최적의 경로를 찾는 기술을 실습하게 됩니다.
차량과 도로의 관계를 어떻게 모델링할지, 최적의 경로를 찾기 위해
어떤 알고리즘을 사용할지 등은 자율주행차 엔지니어들이
매일 해결해야 하는 문제입니다. 이 과정에서는 자율주행 시스템에서
가장 많이 사용되는 데이터 구조와 고리즘을 배우고,
실제 문제 해결에 적용하는 방법을 익힙니다. 특히, 그래프 데이터 구조와
검색 알고리즘을 활용하여 최적의 경로를 찾는 기술을 실습하게 됩니다.
Real-world Project ➎
: 최적의 경로 계획 수립
: 최적의 경로 계획 수립
학습 목표
- 자율주행 시스템에서 데이터 구조가 어떻게 활용되는지 이해하기
- 리스트, 세트, 딕셔너리 등 다양한 데이터 구조 학습
- 검색 문제(Search Problem) 개념과 해결 방법 익히기
- A* 탐색 알고리즘을 활용한 경로 탐색 구현
핵심 기술
- 데이터 구조 (리스트, 세트, 딕셔너리, 그래프)
- 검색 알고리즘 (A* 탐색, 최단 경로 탐색)
- 그래프를 활용한 최적 경로 탐색 로직 구현
- 자율주행 시스템에서의 알고리즘적 사고방식
- 자율주행 시스템에서 데이터 구조가 어떻게 활용되는지 이해하기
- 리스트, 세트, 딕셔너리 등 다양한 데이터 구조 학습
- 검색 문제(Search Problem) 개념과 해결 방법 익히기
- A* 탐색 알고리즘을 활용한 경로 탐색 구현
핵심 기술
- 데이터 구조 (리스트, 세트, 딕셔너리, 그래프)
- 검색 알고리즘 (A* 탐색, 최단 경로 탐색)
- 그래프를 활용한 최적 경로 탐색 로직 구현
- 자율주행 시스템에서의 알고리즘적 사고방식
이론 자세히 보기
1과
문제 해결 접근법
- 자율주행 차량의 주행 전략 결정 원리 학습
- 주행 환경을 분석하여 최적의 차량 거동(차선 변경, 정지, 우회 등) 계획 수립
2과
궤적 생성 (Trajectory Generation)
- C++ 및 Eigen 선형 대수 라이브러리를 활용하여 차량의 주행 궤적 후보 생성
- 경로 생성 알고리즘을 적용하여 최적의 주행 경로 설계
3과
동작 계획 (Motion Planning)
- 도심 환경에서 안전하고 효율적인 차량 의사 결정 시스템 구현
- 모션 계획 알고리즘을 활용한 환경 데이터 기반 경로 생성
- 충돌 회피 및 최적 주행 경로 설계 후 시뮬레이션 검증
- 도로 규칙을 준수하는 도시 주행 시나리오 모델링

미적분 및 컨트롤 시스템
미적분 및 컨트롤 시스템
1개 프로젝트 2주
미적분 및 컨트롤 시스템
1개 프로젝트 2주
자율주행차는 환경을 지속적으로 인식하고, 도로 위에서 매끄럽고
안정적인 움직임을 유지해야 합니다. 이를 위해 미적분과 삼각법이
필수적인 역할을 합니다. 이 과정에서는 속도계, 가속도계, 자이로스코프 등의
센서를 활용해 차량의 움직임을 이해하고, 이를 바탕으로 궤적을 재구성하는
방법을 학습합니다. 최종적으로, 센서 데이터를 활용하여 차량의 이동 경로를
시각적으로 표현하는 프로젝트를 수행하게 됩니다.
안정적인 움직임을 유지해야 합니다. 이를 위해 미적분과 삼각법이
필수적인 역할을 합니다. 이 과정에서는 속도계, 가속도계, 자이로스코프 등의
센서를 활용해 차량의 움직임을 이해하고, 이를 바탕으로 궤적을 재구성하는
방법을 학습합니다. 최종적으로, 센서 데이터를 활용하여 차량의 이동 경로를
시각적으로 표현하는 프로젝트를 수행하게 됩니다.
Real-world Project ➏
: 탄도 시각화 도구 구현
: 탄도 시각화 도구 구현
학습 목표
- 미적분 개념을 활용하여 차량의 움직임을 수학적으로 표현
- 속도계 및 가속도계를 활용한 차량의 이동 거리 및 방향 계산
- 삼각법을 사용해 차량의 움직임을 X, Y 좌표로 변환
- 센서 데이터를 활용한 자율주행차 궤적 시각화 구현
핵심 기술
- 미적분 (도함수 및 적분 활용)
- 삼각법을 통한 차량 이동 경로 분석
- 센서 데이터(속도계, 가속도계, 자이로스코프) 처리
- Python 기반 시각화 라이브러리 활용
- 미적분 개념을 활용하여 차량의 움직임을 수학적으로 표현
- 속도계 및 가속도계를 활용한 차량의 이동 거리 및 방향 계산
- 삼각법을 사용해 차량의 움직임을 X, Y 좌표로 변환
- 센서 데이터를 활용한 자율주행차 궤적 시각화 구현
핵심 기술
- 미적분 (도함수 및 적분 활용)
- 삼각법을 통한 차량 이동 경로 분석
- 센서 데이터(속도계, 가속도계, 자이로스코프) 처리
- Python 기반 시각화 라이브러리 활용
이론 자세히 보기
1과
속도계, 주행거리계, 그리고 도함수
- 도함수를 활용하여 속도 및 가속도의 개념 이해
- 센서 데이터를 기반으로 차량의 속도 변화 분석
2과
가속도계, 자이로스코프, 그리고 적분
- 적분을 이용하여 이동 거리 및 회전 각도 계산
- 시간에 따른 속도의 변화량을 활용한 누적 거리 측정
3과
2D 로봇 모션과 삼각법
- 삼각법을 사용하여 차량의 이동을 X, Y 좌표로 변환
- 차량의 회전 및 직선 이동을 수학적으로 모델링
3과
센서 데이터를 활용한 차량 궤적 재구성
- 가속도, 회전율 데이터를 활용하여 이동 경로 예측
- 센서 데이터를 기반으로 차량의 X, Y 궤적 시각화

머신 러닝 및 컴퓨터 비전
머신 러닝 및 컴퓨터 비전
1개 프로젝트 2주
머신 러닝 및 컴퓨터 비전
1개 프로젝트 2주
컴퓨터에게 자동차와 보행자의 차이를 어떻게 가르칠 수 있을까요?
인간은 직관적으로 이미지를 인식할 수 있지만, 컴퓨터가 이를 이해하도록
만드는 것은 훨씬 복잡한 과정입니다. 이 과정에서는 컴퓨터 비전의 원리를
학습하고, 머신 러닝을 활용하여 컴퓨터가 이미지를 분석하고 분류하는 방법을
익힙니다. 학습을 마치면, 컴퓨터가 이미지 속 개체를 인식하고,
분류할 수 있도록 프로그래밍할 수 있는 능력을 갖추게 됩니다.
인간은 직관적으로 이미지를 인식할 수 있지만, 컴퓨터가 이를 이해하도록
만드는 것은 훨씬 복잡한 과정입니다. 이 과정에서는 컴퓨터 비전의 원리를
학습하고, 머신 러닝을 활용하여 컴퓨터가 이미지를 분석하고 분류하는 방법을
익힙니다. 학습을 마치면, 컴퓨터가 이미지 속 개체를 인식하고,
분류할 수 있도록 프로그래밍할 수 있는 능력을 갖추게 됩니다.
Real-world Project ➐
: 처음부터 이미지 분류자 만들기
: 처음부터 이미지 분류자 만들기
학습 목표
- 컴퓨터 비전의 기초 개념과 이미지 분석 원리 학습
- 머신 러닝을 활용한 이미지 분류 알고리즘 설계
- 색상 변환, 특징 추출 등의 이미지 처리 기법 적용
- 신호등 이미지 분류기(적색, 황색, 녹색) 구축 및 테스트
핵심 기술
- 머신 러닝 기반 이미지 분류 모델 설계
- 색상 변환 및 이미지 전처리 기법 활용
- 특징 추출을 통한 객체 인식 최적화
- 신호등 및 보행자 인식 분류 시스템 구축
- 컴퓨터 비전의 기초 개념과 이미지 분석 원리 학습
- 머신 러닝을 활용한 이미지 분류 알고리즘 설계
- 색상 변환, 특징 추출 등의 이미지 처리 기법 적용
- 신호등 이미지 분류기(적색, 황색, 녹색) 구축 및 테스트
핵심 기술
- 머신 러닝 기반 이미지 분류 모델 설계
- 색상 변환 및 이미지 전처리 기법 활용
- 특징 추출을 통한 객체 인식 최적화
- 신호등 및 보행자 인식 분류 시스템 구축
이론 자세히 보기
1과
컴퓨터 비전과 이미지 분류 개념
- 컴퓨터가 이미지를 인식하는 방식 이해
- 이미지 분류를 위한 머신 러닝 개념 학습
2과
트래픽 신호등 분류기 만들기
- 신호등 이미지를 입력받아 색상을 분류하는 알고리즘 설계
- 머신 러닝을 활용한 데이터 기반 의사결정 구현
3과
특징 추출 및 이미지 변환 기법
- 이미지의 주요 특징을 추출하여 분류 모델의 정확도 향상
- 색상 변환 및 경계 감지를 활용한 이미지 데이터 처리
4과
이미지 분류 모델 최적화 및 테스트
- 보행자 및 자동차 이미지 데이터를 활용한 분류 모델 학습
- 최적화 기법을 적용하여 분류 성능 향상
Lecturer.
강사 소개
강사 소개
Udacity 나노디그리는 실제 업계최고의 현직자이자 강사에게 배웁니다.
글로벌 기업에서 쌓아온 커리어와 경험을 통해, 실무에서 요구되는
핵심 기술과 노하우를 직접 전수합니다.
글로벌 기업에서 쌓아온 커리어와 경험을 통해, 실무에서 요구되는
핵심 기술과 노하우를 직접 전수합니다.

Sebastian Thrun
Udacity 설립자 겸 회장
과학자이자 교육자, 발명가이자 기업가로서 Udacity의 창립자이자 회장입니다. 교육을 민주화하는 것을 목표로 하며, 전 세계 수백만 명의 학생들에게 평생 학습 기회를 제공합니다. 또한 Google X의 창립자로서 자율주행차, Google Glass 등 혁신적인 프로젝트를 이끌며 기술 발전을 선도해왔습니다.

Cezanne Camacho
과정 개발자
Stanford University에서 전기 공학 석사 학위를 취득한 컴퓨터 비전 전문가입니다. 새로운 것을 배우려는 모든 사람에게 영감을 주는 것을 목표로 하며, 보다 포괄적이고 효과적인 STEM 교육 개발에 집중하고 있습니다.

Andy Brown
Andy Brown
MIT에서 물리학 학사 학위를 취득한 후, 독학으로 프로그래밍을 배웠습니다. Udacity의 초창기 멤버로서, 학생들이 최고의 교육 경험을 받을 수 있도록 커리큘럼 개발을 주도하고 있습니다.

Andrew Paster
과정 강사
Yale University에서 공학 학위를 이수하고, 데이터 과학 기술을 활용하여 처음부터 보석 사업을 구축했습니다. Udacity의 Self-Driving Car Engineer Nanodegree 프로그램을 위한 추가 과정을 개발하며, 실무 중심의 자율주행 교육 콘텐츠 제작에 기여하고 있습니다.

Anthony Navarro
Product Lead
콜로라도 주립 대학에서 컴퓨터 공학 석사 학위를 취득한 미 육군 퇴역군인입니다. Udacity에서 제품 책임자(Product Lead)로 활동하기 전, Lockheed Martin의 Autonomous Systems R&D 부서에서 수석 소프트웨어 엔지니어로 근무하며 자율주행 시스템 연구에 기여했습니다.

Tarin Ziyaee
Tarin Ziyaee
Voyage Auto에서 인공지능(AI) 책임자로, 저렴한 자율주행 택시를 개발하는 데 주력하고 있습니다. Apple과 같은 기업과 협력하며 인식 및 심층 신경망 분야에서 14년 이상의 경험을 보유하고 있으며, 자율주행 기술의 상용화를 위한 연구와 개발을 이끌고 있습니다.

Elecia White
엔지니어, 작가 및 진행자
Logical Elegance, Inc의 임베디드 소프트웨어 엔지니어이자, O'Reilly에서 출판한 ‘Making Embedded Systems'의 저자이며, Embedded.fm 팟캐스트의 진행자입니다. 엔지니어링과 디바이스에 대한 열정을 공유하는 것을 즐기며, 임베디드 시스템 분야에서 풍부한 경험을 가지고 있습니다.
Growth Support.
성장 지원
성장 지원
Udacity 나노디그리는 단순한 강의 제공을 넘어, 실무에서 경쟁력을
갖출 수 있도록 철저한 지원을 제공합니다. 업계 전문가의 피드백과 최신 기술을
반영한 학습 환경을 통해, 실제 현장에서 활용할 수 있는 실무 역량을
갖출 수 있도록 설계되었습니다.
갖출 수 있도록 철저한 지원을 제공합니다. 업계 전문가의 피드백과 최신 기술을
반영한 학습 환경을 통해, 실제 현장에서 활용할 수 있는 실무 역량을
갖출 수 있도록 설계되었습니다.
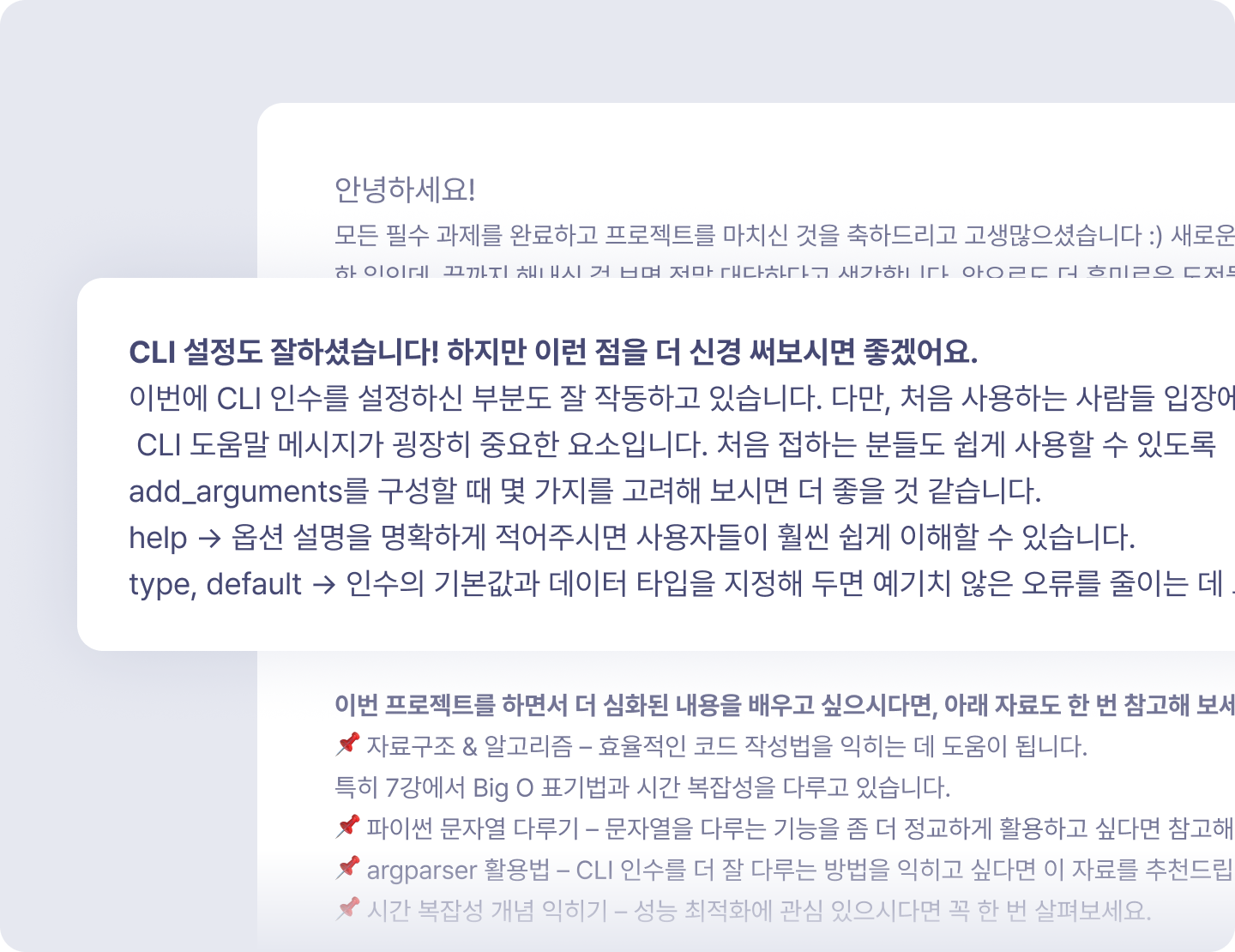
SUPPROT 1
글로벌 현직 전문가가 제공하는
1:1 무제한 피드백 & 질의응답
글로벌 현직 전문가가 제공하는
1:1 무제한 피드백 & 질의응답
글로벌 기업에서 활약하는 멘토가 1:1 로 여러분의 프로젝트를 검토하고,
실무 수준의 피드백을 무제한으로 제공합니다. 멘토의 글로벌 경험과 인사이트를
바탕으로 더욱 넓은 시야에서 문제를 접근하고, 실질적인 성장의 기회를
포착할 수 있습니다.
실무 수준의 피드백을 무제한으로 제공합니다. 멘토의 글로벌 경험과 인사이트를
바탕으로 더욱 넓은 시야에서 문제를 접근하고, 실질적인 성장의 기회를
포착할 수 있습니다.
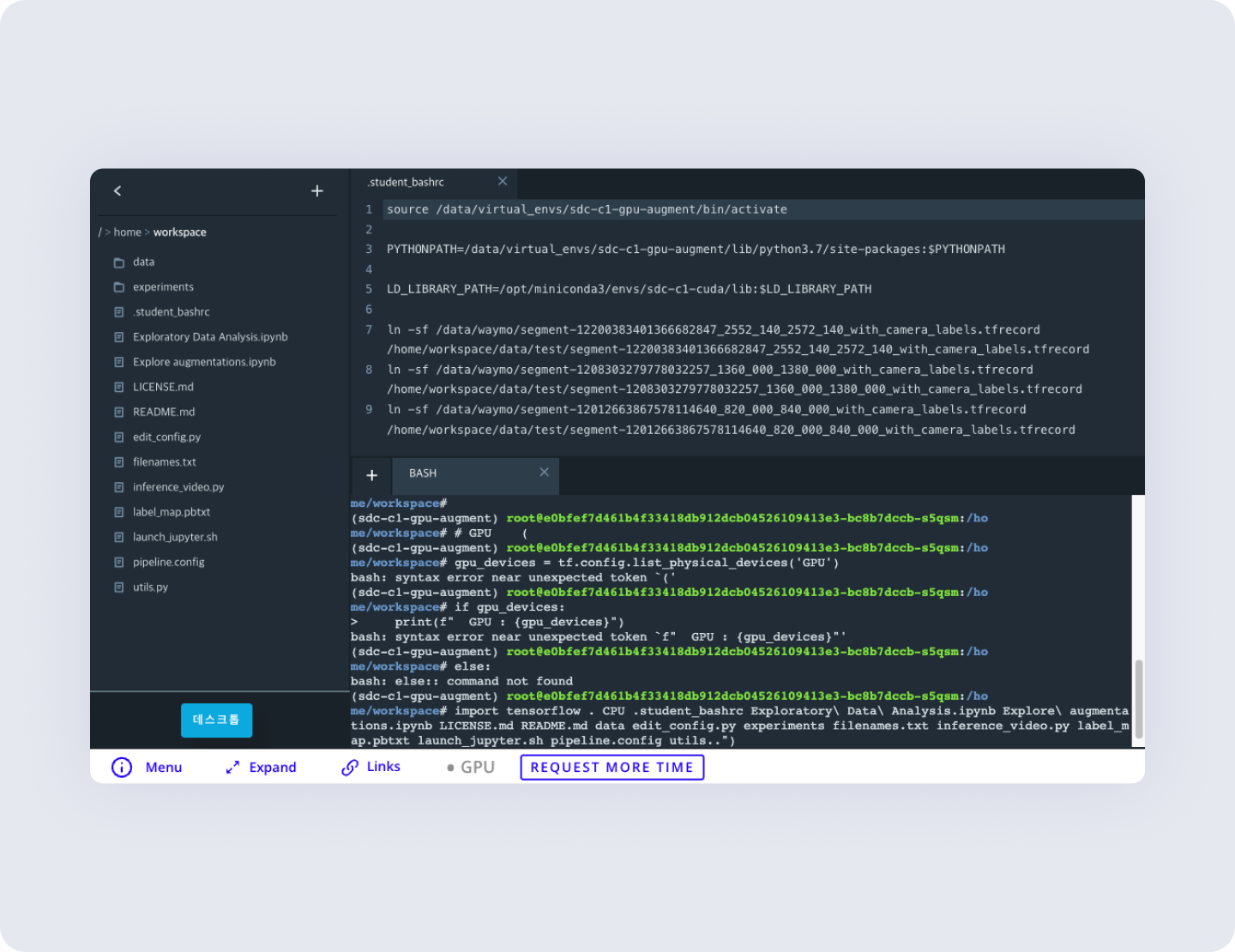
SUPPROT 2
고사양 PC 필요없이, 실제 현장과 같은
클라우드 기반 실습 환경 제공 (Workspace)
고사양 PC 필요없이, 실제 현장과 같은
클라우드 기반 실습 환경 제공 (Workspace)
별도의 고사양 PC나 복잡한 설치 과정 없이, 클라우드 기반 워크스페이스에서
실무와 동일한 환경을 경험하세요. 언제 어디서나 접근 가능한 클라우드 환경에서
실제 업무 프로세스를 익히고, 현업에서 바로 적용할 수 있는 실습을
진행할 수 있습니다.
실무와 동일한 환경을 경험하세요. 언제 어디서나 접근 가능한 클라우드 환경에서
실제 업무 프로세스를 익히고, 현업에서 바로 적용할 수 있는 실습을
진행할 수 있습니다.
SUPPROT 3
최신 기술 & 지속적인 업데이트
최신 기술 & 지속적인 업데이트
트렌드에 따른 학습 자료와 실습 자료를
지속적으로 업데이트하여 업계에서 요구하는
최신 스킬을 습득할 수 있습니다.
지속적으로 업데이트하여 업계에서 요구하는
최신 스킬을 습득할 수 있습니다.
SUPPROT 4
Q&A & 멘토링 지원
Q&A & 멘토링 지원
글로벌 기업의 멘토와의 1:1 Q&A 및 멘토링을 통해
기술 및 학습과정에서 마주하는 문제를 해결하고,
보다 깊이 있는 학습 경험을 제공합니다.
기술 및 학습과정에서 마주하는 문제를 해결하고,
보다 깊이 있는 학습 경험을 제공합니다.
SUPPROT 5
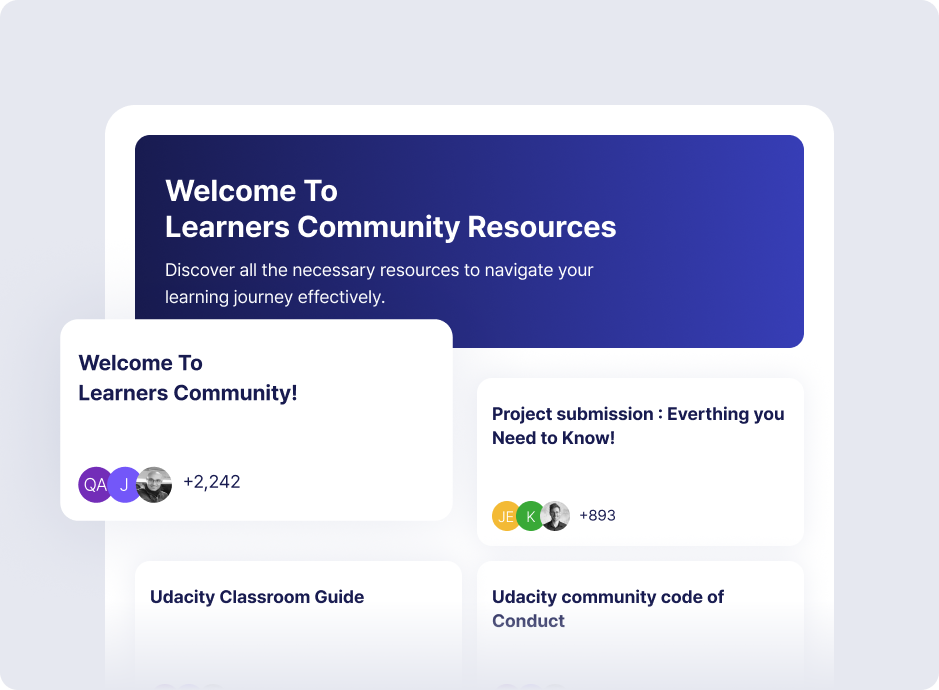
함께 성장하는 커뮤니티
함께 성장하는 커뮤니티
전 세계 학습자들과 교류하며 인사이트를 나누고,
최신 정보와 경험을 공유하세요. 함께 성장하는
커뮤니티를 통해 더 넓은 시야를 확보할 수 있습니다.
최신 정보와 경험을 공유하세요. 함께 성장하는
커뮤니티를 통해 더 넓은 시야를 확보할 수 있습니다.
SUPPROT 6
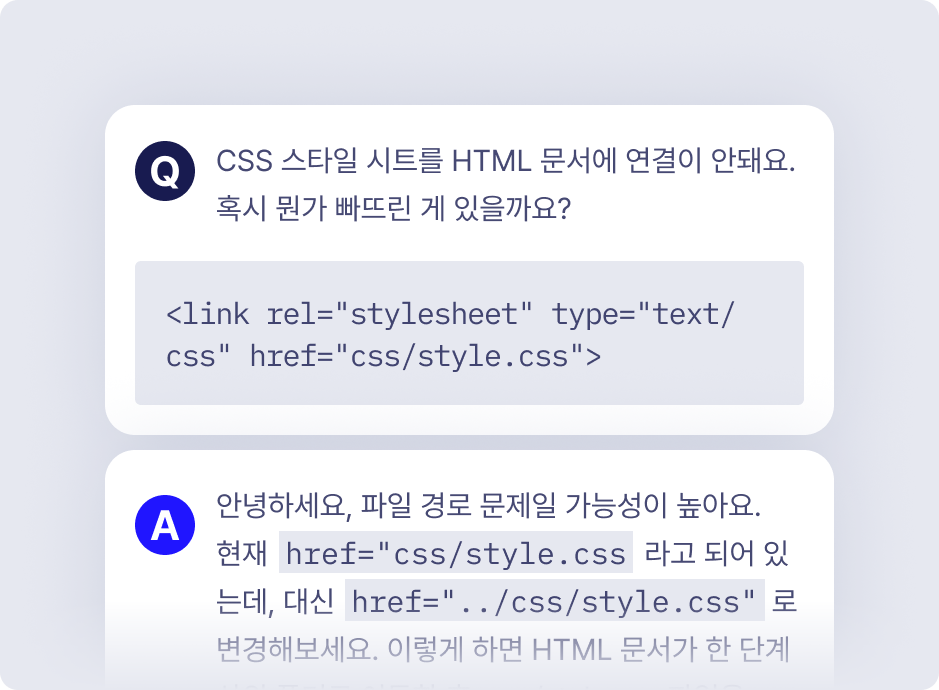
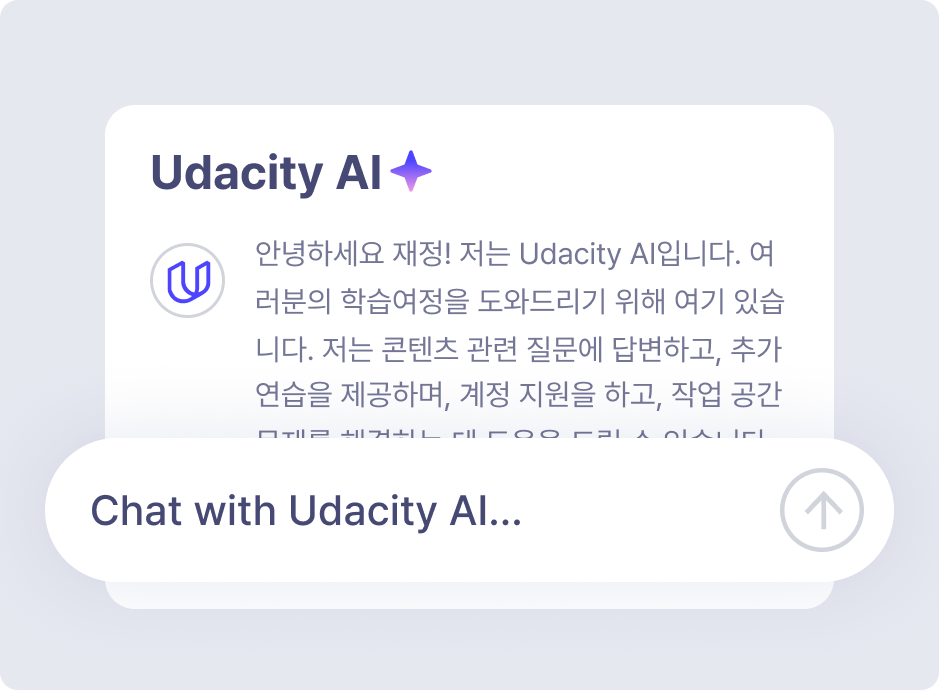
AI를 활용한 학습지원
AI를 활용한 학습지원
전문가 Q&A뿐만 아니라 Udacity AI를 지원하여,
언제든지 빠르고 정확한 답변을 즉각적으로
받을 수 있습니다.
언제든지 빠르고 정확한 답변을 즉각적으로
받을 수 있습니다.


나노디그리 수료는 끝이 아니라, 커리어 성장의 시작입니다.
커리어를 발전시키는 과정에서 새로운 지식을 쌓고, 언제 어디서라도최신 기술을 익힐 수 있도록
패스트캠퍼스의 강의를 평생소장으로 제공합니다. 지속적인 학습을 통해 더 큰 도약을 준비하세요.
* 결제 이후, 1개 강의를 평생소장할 수 있는 쿠폰을 발급해드립니다.

패스트캠퍼스의 강의를
상황에 맞게 활용해보세요.
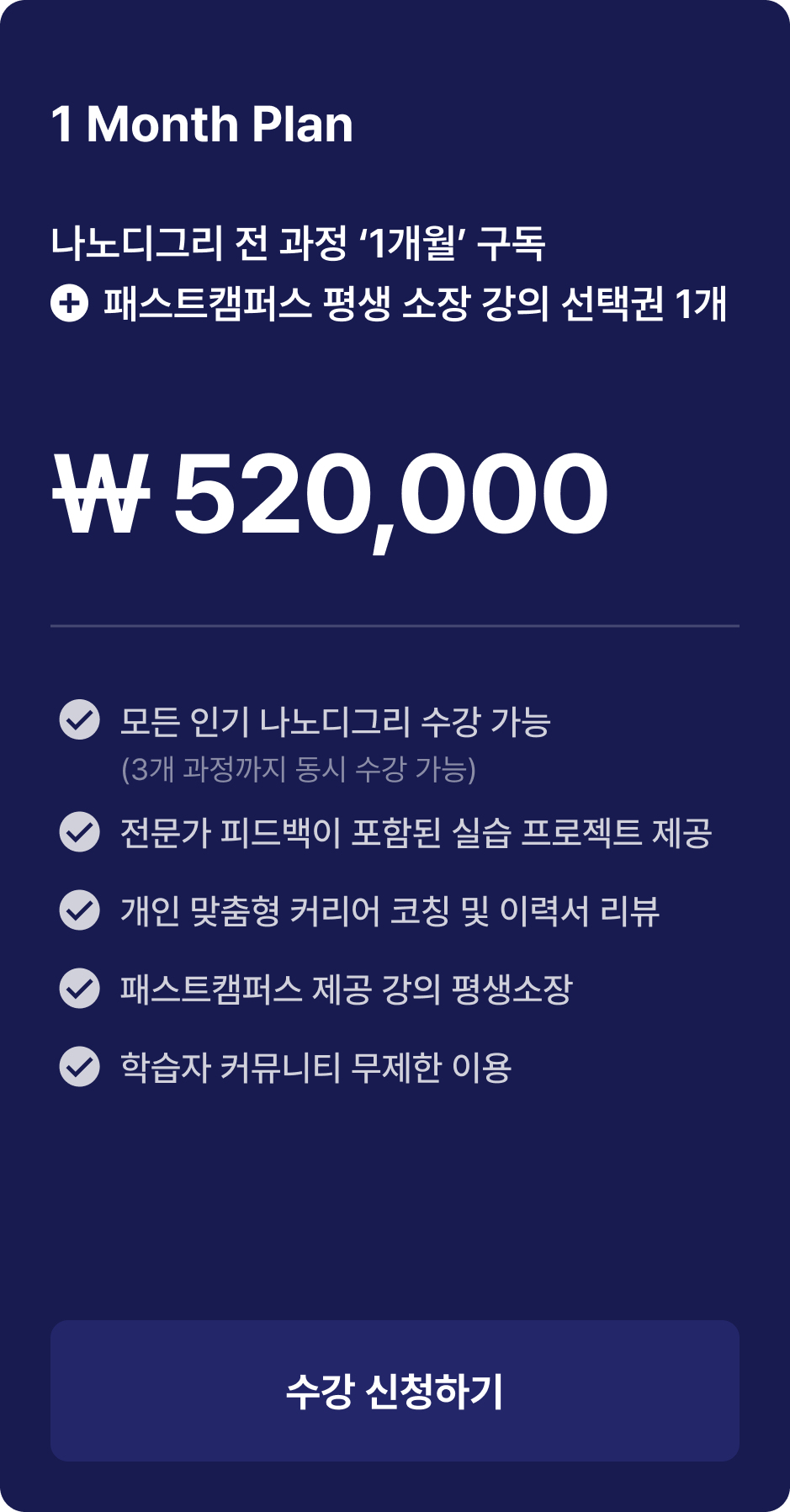
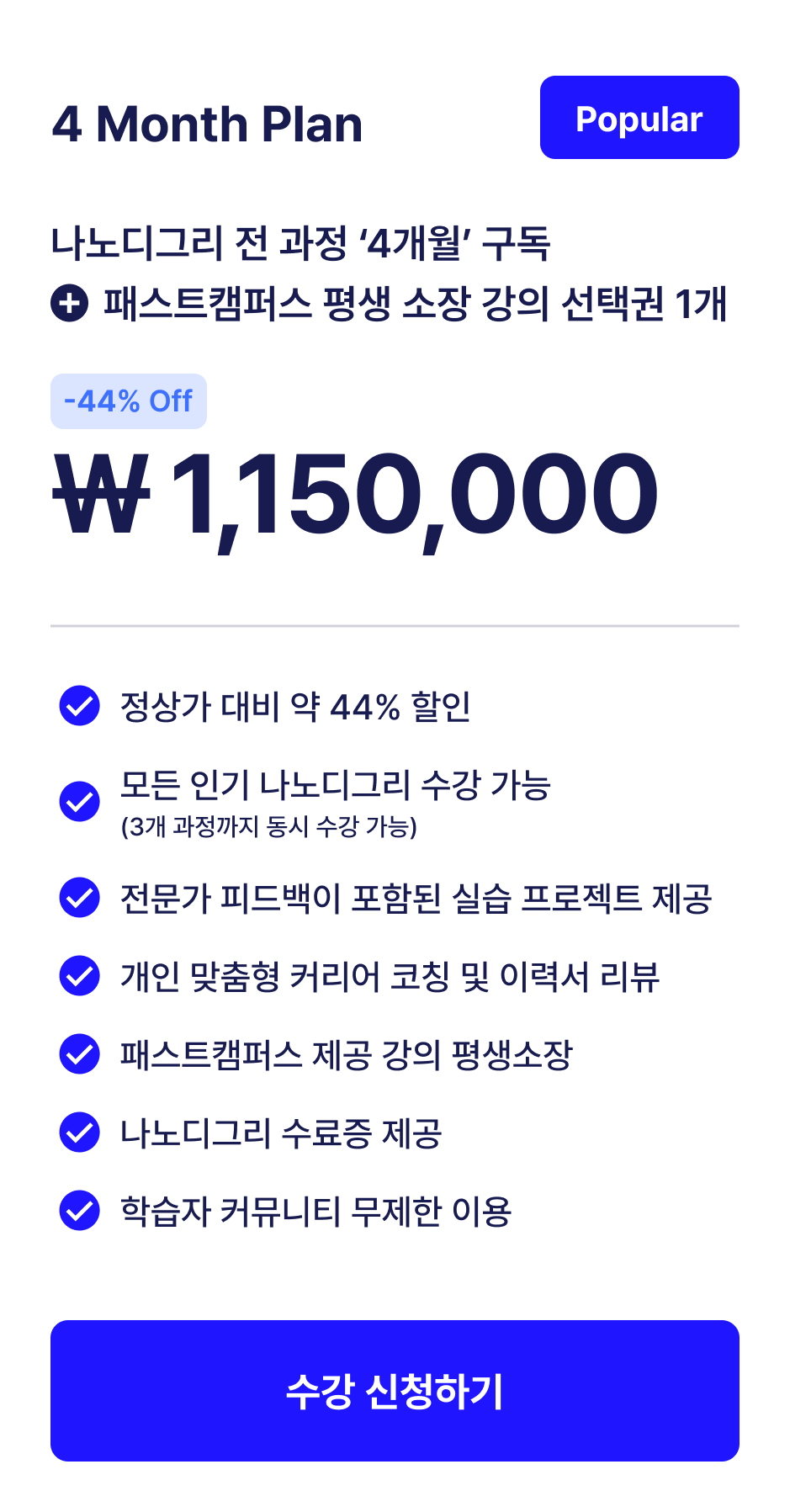
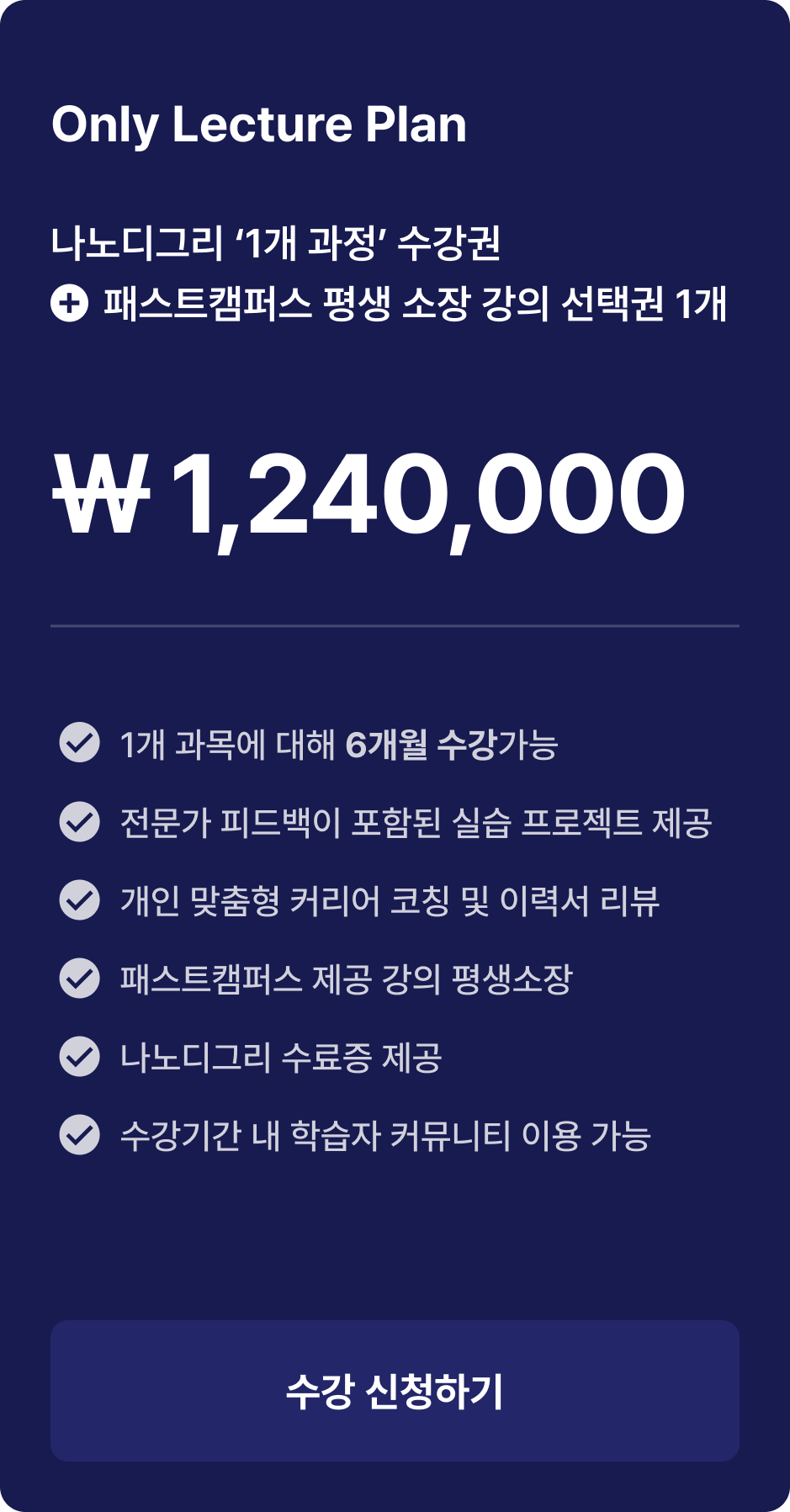
런칭 기념 특별 혜택.
패스트캠퍼스 x Udacity Nanodegree 런칭 기념 특별 상품 구성
오직 이번 런칭 기간 동안만! 최적의 구성과 특별한 가격으로 만나보세요.
여러분의 커리어를 한 단계 끌어올릴 3가지 옵션 중 가장 적합한 상품을 선택하세요.
유다시티 나노디그리의
교육 우수성은 숫자가 증명합니다.
누적 수강생 수
16,900,000 명+
전 세계 160개국 이상에서 1,690만 명 이상의 학습자가 경험
제출된 프로젝트 수
2,600,000 개+
기업이 요구하는 실전 프로젝트 문제 약 260만 개 이상 제출
수료증 발급 수
205,000 개+
20만 개 이상의 유다시티 나노디그리 수료증 발급
졸업생 경력 변화
73 %
니노디그리 졸업생의 73%가 커리어 성장을 경험
나노디그리를 경험한
학생들의 리뷰를 만나보세요.

자율주행 입문자에게 최적화된 단계별 학습 과정이었습니다.
자율주행차를 처음 배우는 사람들에게 최고의 입문 과정이었습니다. 개념을 단계별로 체계적으로 익힐 수 있었고, 추가 학습을 위한 확장 자료도 유용했습니다. 초급 학습자로서 큰 도움을 받았고, 다음 과정도 계속해서 도전할 계획입니다.
Junjie X.
자율주행의 원리를 깊이 이해할 수 있었던 과정이었습니다.
자율주행차가 어떻게 작동하는지 사용자 관점뿐만 아니라 엔지니어링 관점에서도 궁금했는데, 이 나노디그리 과정이 모든 질문에 대한 답을 주었습니다. 기대했던 그대로의 커리큘럼이었고, 개념을 체계적으로 배울 수 있어 매우 만족스러웠습니다.
Zakaria C.
자율주행 입문부터 실무까지, 기대 이상의 학습 경험이었습니다.
자율주행차 입문’ 과정을 통해 ‘자율주행차 엔지니어’ 과정의 탄탄한 기초를 쌓을 수 있었습니다. 다양한 배경을 가진 학습자도 쉽게 이해할 수 있도록 설계된 커리큘럼이 인상적이었고, 첫 번째 프로젝트를 마치면서 큰 성취감을 느꼈습니다. 기대 이상으로 만족스러운 과정이었습니다. 감사합니다,
Rakesh Kumar M.
핵심 개념을 깊이 있게 다룬 유익한 강의였습니다.
자율주행의 핵심 개념을 체계적으로 배우기에 좋은 과정이었습니다. 강의 영상과 설명이 깊이 있어 개념을 명확하게 이해할 수 있었고, 다음 단계의 학습을 위한 탄탄한 기반을 다질 수 있었습니다.
Divyang T.
국내 7개 카드사 12개월 무이자 할부 지원! (간편 결제 제외)