어떤 분들이
수강하시면 좋을까요?
자율주행을 위한 컴퓨터비전과 라이다 & 센서퓨전까지 초격차 패키지 Online.
자율주행 컴퓨터비전
자율주행 기술
초격차 패키지 Online.
자율주행을 위한 컴퓨터비전과
라이다 & 센서퓨전까지

-
국내 유일 자율주행 기술 Full Cover
국내 최초 자율주행을 한 번에 학습할 수 있게 6개의 기술을 52개의 프로젝트 실습으로 마스터!
-
자율주행 대표 2가지 기술 구현
주요 Computer Vision 알고리즘을 활용하여 자율주행 대표 기술인 ADAS & DMS 직접 구현!
-
3개의 최종 프로젝트까지!
각 모듈에서의 개발 뿐만 아니라 전체 자율주행 시스템 아키텍쳐를 이해하기 위한 융합 프로젝트
자율주행을 위한 컴퓨터비전과 라이다 & 센서퓨전까지 초격차 패키지 Online.
[특별 구성] 자율주행을 위한 로봇 올인원 패키지 (SLAM&컴퓨터비전&라이다&센서퓨전)
패키지 상품


총 2과목
 로보틱스 & 3D 컴퓨터 비전 개발을 위한 SLAM 바이블 with 슬램슬램정가 900,000원
로보틱스 & 3D 컴퓨터 비전 개발을 위한 SLAM 바이블 with 슬램슬램정가 900,000원 자율주행을 위한 컴퓨터비전과 라이다 & 센서퓨전까지 초격차 패키지 Online.정가 1,100,000원
자율주행을 위한 컴퓨터비전과 라이다 & 센서퓨전까지 초격차 패키지 Online.정가 1,100,000원
로봇의 3D 공간 인지를 위한 SLAM부터, 국내 유일 자율주행 Full Cover (CV, 라이다, 센서퓨전) 기술까지! 로보틱스 및 자율주행의 핵심 기술을 마스터!
가격2,000,000원
할인 판매가69% 할인616,800원
12개월 할부월 51,400원
Tesla의 자율 주행은
수많은 주행 데이터를 학습하고 또 학습시켜서
최적의 안전한 운전 방법을 스스로 만들어 냅니다.
- Tesla CEO Elon Musk

스스로 학습하여 자율주행을 가능하게 하는 기술
Computer Vision 기반 자율주행 기술과 판단 · 제어 알고리즘

자율 주행을 위해 필요한 Computer Vision 기술부터
판단·제어 알고리즘까지 모두 한 번에 끝낼 수 있는
국내 최초/유일 자율 주행 초격차 패키지

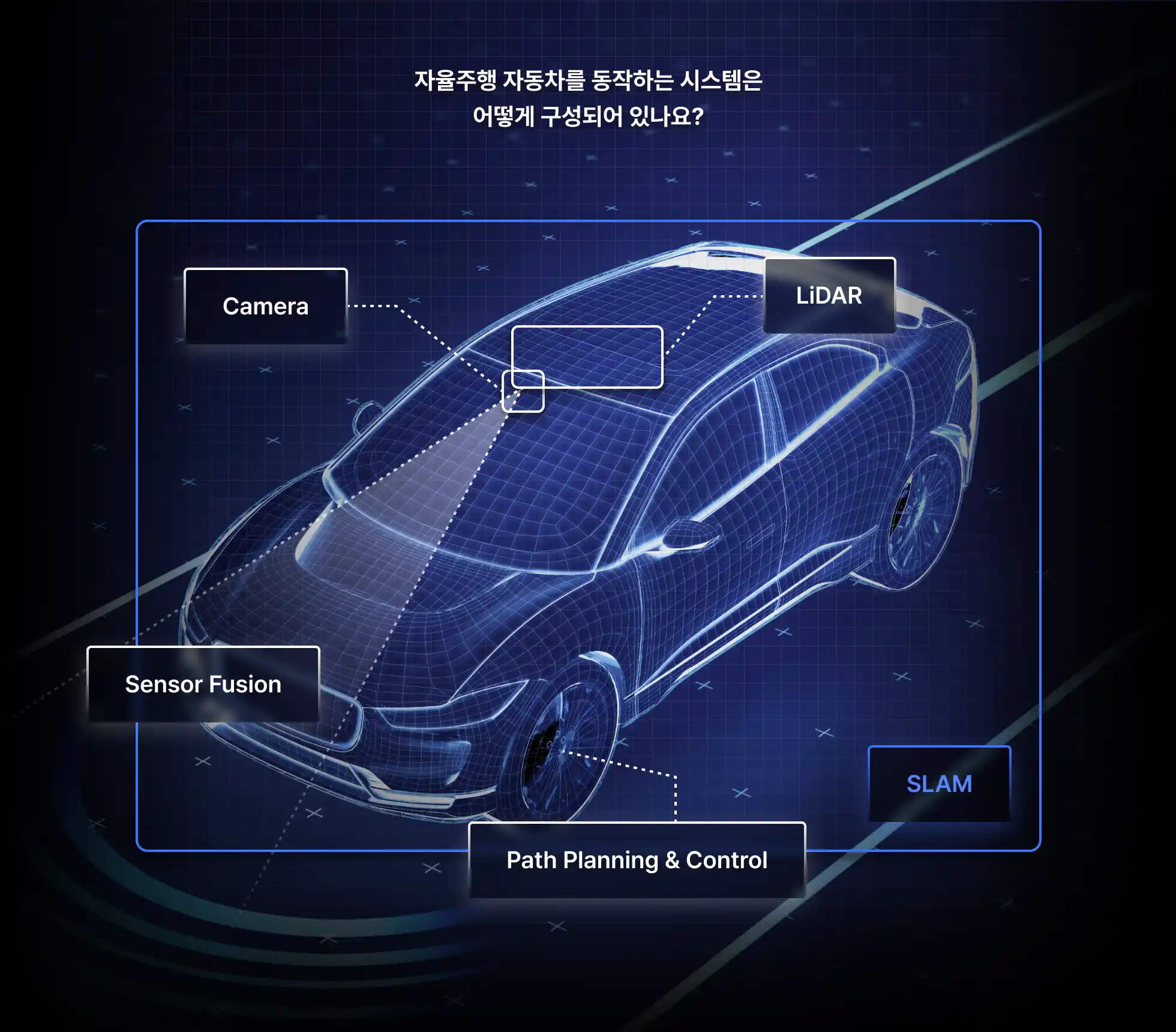
국내 최초 자율주행에 필요한 6개 기술
한 번에 Full Cover!
자율주행의 눈 역할을 하는 기술
01. Camera
01. Camera
다른 사물과의 거리 측정 기술
02. LiDAR Sensor
02. LiDAR Sensor
주행 정확도를 향상시키는 기술
03. Sensor Fusion
03. Sensor Fusion
자동차의 위치 정보를 확인하는 기술
04. SLAM
04. SLAM
목적지까지 주행 경로를 계획하는 기술
05. Motion Planning
05. Motion Planning
경로 계획 기반 차량을 제어하는 기술
06. Control
06. Control

국내 최초!
초격차 패키지에서만 경험할 수 있는 프로젝트


초격차 패키지만의 특별한 혜택까지
6개의 자율주행 기술 / 52개의 프로젝트 / 110시간의 방대한 커리큘럼으로
오직 패스트캠퍼스에서만 공부할 수 있는 자율주행 Full Cover 강의!


딥러닝 기반 Computer Vision을 활용한 Camera 시스템 구현
자율주행 구현을 위한 Computer Vision 알고리즘을 학습하여
차량의 내/외부 센싱 시스템 ADAS & DMS 시스템 구현

Dlib 라이브러리와
Retina Face Detection 실습
운전자의 상태를 파악하여 얼굴 영역
검출을 위한 Face Detection 실습
Retina Face Detection 실습
운전자의 상태를 파악하여 얼굴 영역
검출을 위한 Face Detection 실습
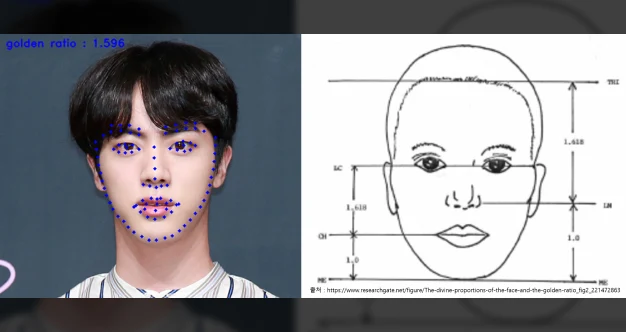
얼굴의 황금비율
계산 프로젝트 실습
운전자의 졸음 상태를 파악하기 위한
Face Landmark Detection 실습
계산 프로젝트 실습
운전자의 졸음 상태를 파악하기 위한
Face Landmark Detection 실습
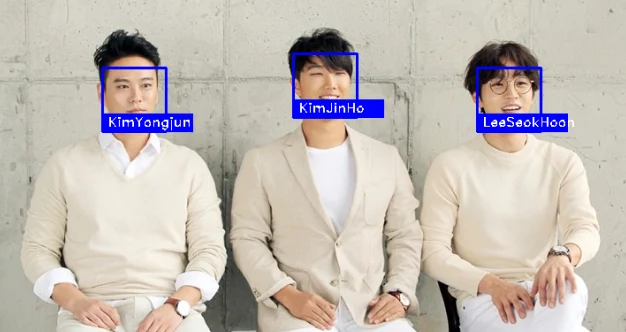
가수 SG 워너비
각각의 멤버 인식하기
운전자 본인 확인을 위한 시스템을 설계하기 위해
Face Recognition 실습
각각의 멤버 인식하기
운전자 본인 확인을 위한 시스템을 설계하기 위해
Face Recognition 실습

마스크 검출 프로젝트
자율주행에서 다른 차량, 보행자 인식을 위한
RGB 카메라 기반의 Object Detection 실습
자율주행에서 다른 차량, 보행자 인식을 위한
RGB 카메라 기반의 Object Detection 실습

표지판, 신호등 검출 프로젝트
실제 주행에 필요한 정보를 얻기 위해 도로 위
표지만 및 신호등을 Object Detection으로 검출
실제 주행에 필요한 정보를 얻기 위해 도로 위
표지만 및 신호등을 Object Detection으로 검출

Lidar 기반의 차량 검출 프로젝트
자율주행에서 본인확인 시스템을 설계하기 위한
Object Detection 실습
자율주행에서 본인확인 시스템을 설계하기 위한
Object Detection 실습

건물 영역 검출
프로젝트
ADAS 알고리즘에서 도로 등과 같은 특정 영역을
검출하기 위한 Building Segmentation 실습
프로젝트
ADAS 알고리즘에서 도로 등과 같은 특정 영역을
검출하기 위한 Building Segmentation 실습
위 내시경 용종 검출
프로젝트
위 내시경 용종 검출 실습을 통해 도로의
특정 영역 경계가 얉아도 검출 가능한 아이디어 학습
프로젝트
위 내시경 용종 검출 실습을 통해 도로의
특정 영역 경계가 얉아도 검출 가능한 아이디어 학습
도로 영역 검출
프로젝트
실제 자율주행 주행 도로 환경에서
도로 영역 검출 실습
프로젝트
실제 자율주행 주행 도로 환경에서
도로 영역 검출 실습

딥러닝 기반 Computer Vision 3가지 대표 알고리즘을 이해하였다면, 2가지의 Final Project로
자율주행 내/외부 센싱 시스템인 ADAS & DMS System을 구현하는 방법을 학습합니다.


ADAS
(Autonomous Driving Assistant System)
(Autonomous Driving Assistant System)
운전 중 발생할 수 있는 수많은 상황 가운데, 일부를 차량이 직접 인지하여
상황을 판단하고 기계장치를 제어하는 기술입니다. 해당 기술을 직접 구현해보며
운전자가 안전하고 편리하게 주행할 수 있는 자율주행 방법론을 학습합니다.

DMS
(Drivier Monitroing System)
(Drivier Monitroing System)
감지 기술과 분석을 사용하여 머리와 몸의 자세, 눈의 상태, 주의력 판단, 졸음,
감정, 장애 등 운전자를 직접 모니터링하는 기술입니다. 해당 기술을 직접
구현해보며 운전자의 현재 상태를 모니터링하는 자율주행 방법론을 학습합니다.

잠깐! 넘어가기 전, Perception 파트 강사님의 강의에 대한 한 마디
Perception Track Engineer ‘Jane 님’
1. 차량의 내/외부 센싱 시스템에서는 다양한 Computer Vision 알고리즘이 사용되고 있습니다.
2. 이 강의에서는 Face Recognition, Object Detection, Image Segmentation 등 주요 자율주행에 활용되는 Computer Vision 알고리즘의 이론부터 실습까지 모두 다루고 있습니다.
3. 이 강의를 통해 자율주행에 활용되는 Computer Vision 알고리즘 기반 자율주행 시스템 구현이 가능한 개발 지식을 쌓을 수 있길 바랍니다.

LiDAR 센서를 이용한 3차원 객체 감지 Computer Vision 기술
3차원 환경에서 객체 감지와 영역 분할이 가능한
컴퓨터 비전 기술, LiDAR 센서



테스트를 위한
ROS 환경 구성
LiDAR 데이터를 받아 알고리즘 테스트 및
검증을 위한 LiDAR 데이터 로그 실습
ROS 환경 구성
LiDAR 데이터를 받아 알고리즘 테스트 및
검증을 위한 LiDAR 데이터 로그 실습

포인트 클라우드 처리 방법 구현을 위한
Open 3D
포인트 클라우드의 특징 추출의 기본 원리를
학습하기 위한 Open 3D 실습
Open 3D
포인트 클라우드의 특징 추출의 기본 원리를
학습하기 위한 Open 3D 실습
포인트 클라우드 구현의 이해 후, 딥러닝 기반 포인트 클라우드 처리를 학습하면서
이미지와의 다른 특성을 이해하기 위해 PointNet, PointNet ++, Dynamic Graph CNN을 배웁니다.
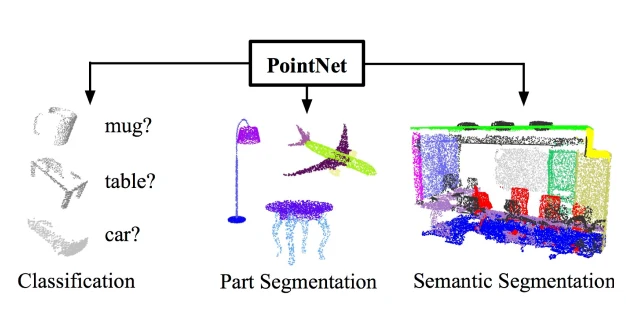
PointNet
포인트 클라우드 데이터의 불규칙한 특징으로 인한 3D Voxel Grid 혹은 이미지 모음으로 변환하면서 데이터가 불필요하게 방대해지는 문제 해결
포인트 클라우드 데이터의 불규칙한 특징으로 인한 3D Voxel Grid 혹은 이미지 모음으로 변환하면서 데이터가 불필요하게 방대해지는 문제 해결
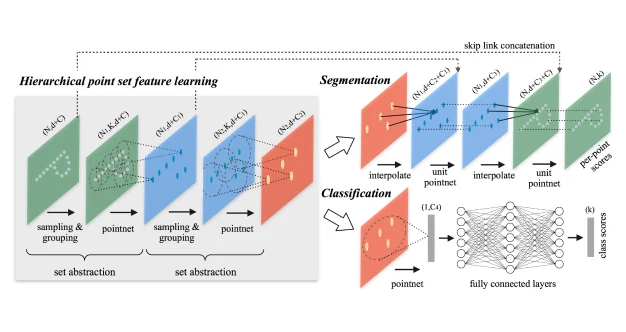
PointNet ++
기존 PointNet에서 Local한 특징을 잡아내지 못하는 PointNet을 보완하여 Classfication과 Segmentation 성능을 끌어올려 문제 해결
기존 PointNet에서 Local한 특징을 잡아내지 못하는 PointNet을 보완하여 Classfication과 Segmentation 성능을 끌어올려 문제 해결
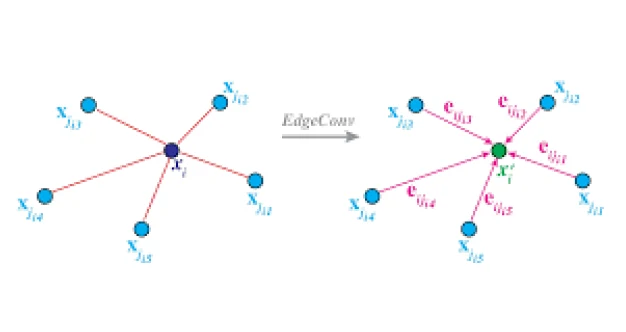
Dynamic Graph CNN
각 Point들 간의 순서의 불변성으로 인해 Point들 간의 약한 기하학적 관계와 Local Feature를 포착하지 못하는 근본적인 한계를 해결
각 Point들 간의 순서의 불변성으로 인해 Point들 간의 약한 기하학적 관계와 Local Feature를 포착하지 못하는 근본적인 한계를 해결

고전적인 포인트 클라우드
매칭 방법 학습
두 개의 포인트 클라우드를 정렬하는 공간의
변환을 찾는 과정을 학습
매칭 방법 학습
두 개의 포인트 클라우드를 정렬하는 공간의
변환을 찾는 과정을 학습
딥러닝 기반 포인트 클라우드
매칭 방법 학습(RPM-Net)
포인트 클라우드 매칭의 성능을 더욱 향상시키기 위해 공간 좌표와 Local Geometry를 활용
매칭 방법 학습(RPM-Net)
포인트 클라우드 매칭의 성능을 더욱 향상시키기 위해 공간 좌표와 Local Geometry를 활용

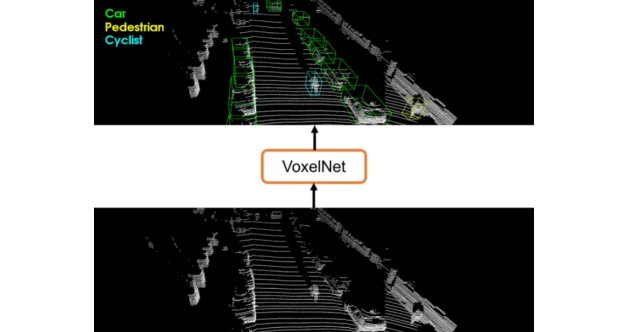
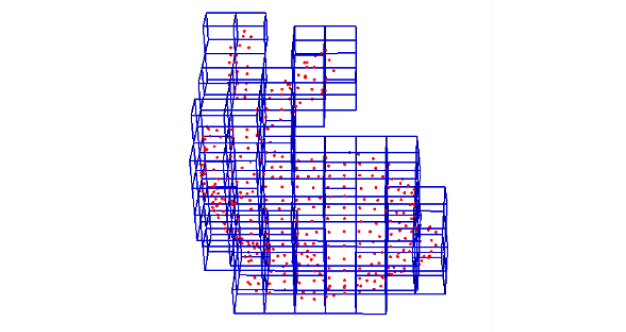
VoxelNet
3차원 공간에 퍼져있는 포인트 클라우드를
Voxel이라는 개념으로 Detection 하는 방법 학습
3차원 공간에 퍼져있는 포인트 클라우드를
Voxel이라는 개념으로 Detection 하는 방법 학습
PointPillars
VoxelNet에 비해 Real time Detection을 사용하기에는 너무 느리기에 Point Cloud를 Pillars(수직 기둥들) 형태로 인코딩하는 방법 학습
VoxelNet에 비해 Real time Detection을 사용하기에는 너무 느리기에 Point Cloud를 Pillars(수직 기둥들) 형태로 인코딩하는 방법 학습
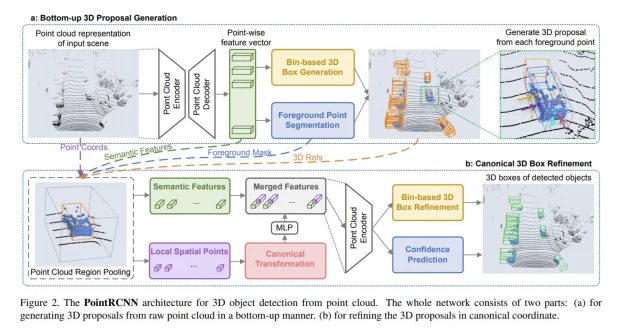
Point R-CNN
3D Point Representation을 그대로 활용하면서
3D 정보를 더 잘 활용할 수 있는 방법 학습
3D Point Representation을 그대로 활용하면서
3D 정보를 더 잘 활용할 수 있는 방법 학습

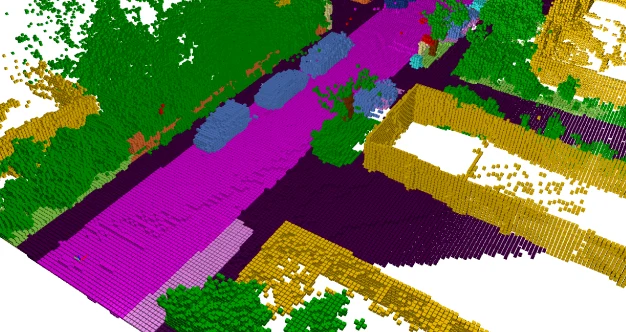
3D Segmentation
3차원 공간에서의 Point 데이터를 입력으로 받아 Point 주변 정보를 분석하여 Point의 의미를 구분하는 방법을 학습합니다.
3차원 공간에서의 Point 데이터를 입력으로 받아 Point 주변 정보를 분석하여 Point의 의미를 구분하는 방법을 학습합니다.
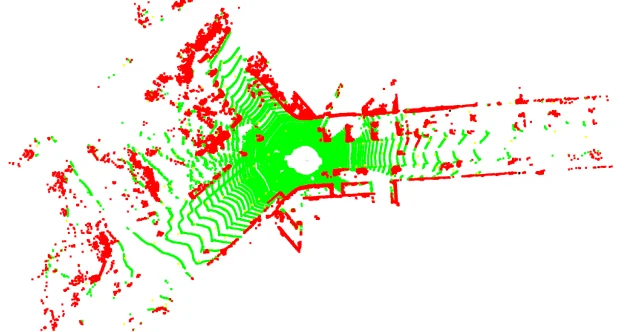
Ground Segmentation
자율주행 차량이 주행 가능한 도로에서 달릴 수 있게 도로 영역에 초점을 맞추어 영역을 구분하는 방법을 학습합니다.
자율주행 차량이 주행 가능한 도로에서 달릴 수 있게 도로 영역에 초점을 맞추어 영역을 구분하는 방법을 학습합니다.
Loop Closure Detection
이전에 방문한 위치로 돌아왔는지를 감지하는 방법을 배우면서 자율주행 차량이 이전 방문했던 장소를 인지할 수 있는 방법을 학습합니다.
이전에 방문한 위치로 돌아왔는지를 감지하는 방법을 배우면서 자율주행 차량이 이전 방문했던 장소를 인지할 수 있는 방법을 학습합니다.
PointCloud의 특징을 이해하였다면 5개의 Final Project를 직접 구현하여
3차원 공간에서 LiDAR 센서의 역할별로 이미지를 처리하는 방법을 학습합니다.
포인트 클라우드 매칭을 활용한 Place Recognition
자율주행 차량의 위치 추정에 있어 재방문 장소를 인지하는 역할을 수행하는
기술입니다. 해당 기술을 직접 구현해보며 자율주행은 물론 3차원 분야에서
요구하고 있는 포인트 클라우드의 매칭 방법을 학습합니다.
mmDetection을 이용한 3차원 객체 검출
3차원 객체 검출 방법을 통해 자율주행 차량이 이동 시 주변 다른 차량 및 보행자를
검출할 수 있는 기술입니다. 해당 기술을 직접 구현해보며 딥러닝 기반 Lidar 데이터에서의
객체 검출 방법을 학습합니다.
LiDAR 데이터의 3차원 Segmentation
3차원 Segmentation을 이용하여 자율주행 차량이 달리고 있는 영역이
도로인지 보행로인지 등을 판단하는 기술입니다. 3차원 Segmentation
방법이 어떻게 동작하는지와 지면을 인지하는 방법을 학습합니다.
Patchwork 기반 Ground Segmentation
Segmentation 영역 중 보다 지면 영역에 초점을 두어 결과를 도출하는
기술입니다. 단순 센서 데이터를 벗어나 Segmentation 방법론을 활용하여
자율주행 차량이 엉뚱한 도로에서 주행하는 상황을 방지할 수 있습니다.
OverlapNet 기반 Loop Closure 검출
SLAM 기술과 연관성이 있는 기존에 방문했던 장소를 인지할 수 있는
Loop Closure Detection 방법론에서 Segmentation 정보를 활용하는
기술입니다. 자율주행 차량이 기존 방문 장소를 쉽게 인지할 수 있도록 합니다.

잠깐! 넘어가기 전, LiDAR 파트 강사님의 강의에 대한 한 마디
LiDAR Track Engineer ‘김선호 님’
1. 현업에서 문제를 잘 해결해야 하는 것이 관건이다 보니 저는 ‘내가 먼저 이 상황에서 어떤 문제를 해결해야 하고, 그 문제를 해결하기 위해 어떤 기술을 쓰는 것이 좋을까?’ 에 러닝 포인트를 잡아서 강의를 구성하였습니다.
2. 저의 강의는 라이다를 이용한 데이터 처리 및 인지를 함에 있어 어떻게 써야 할지 모르거나 Computer Vision과 처리 방식부터
차이가 있어 해당 부분의 지식이 필요하신 분들을 위한 강의입니다.
3. 특히 일반 LiDAR 강의와도 다르게 LiDAR 데이터 고유의 특성과 이를 기반으로 자율주행에 적용할 수 있는 방법, Detection과 Segmentation 분야에서 이미지와는 다르게 어떻게 데이터를 받아와 모델을 학습하는지 노하우를 담았습니다.

다중 센서 융합을 이용한 3차원 객체 검출 기술 Sensor Fusion 구현
단일/다중 센서의 동작 원리를 명확하게 학습하고
차량 주변 장애물을 인지하여 안전하게 주행할 수 있는 기술 실습


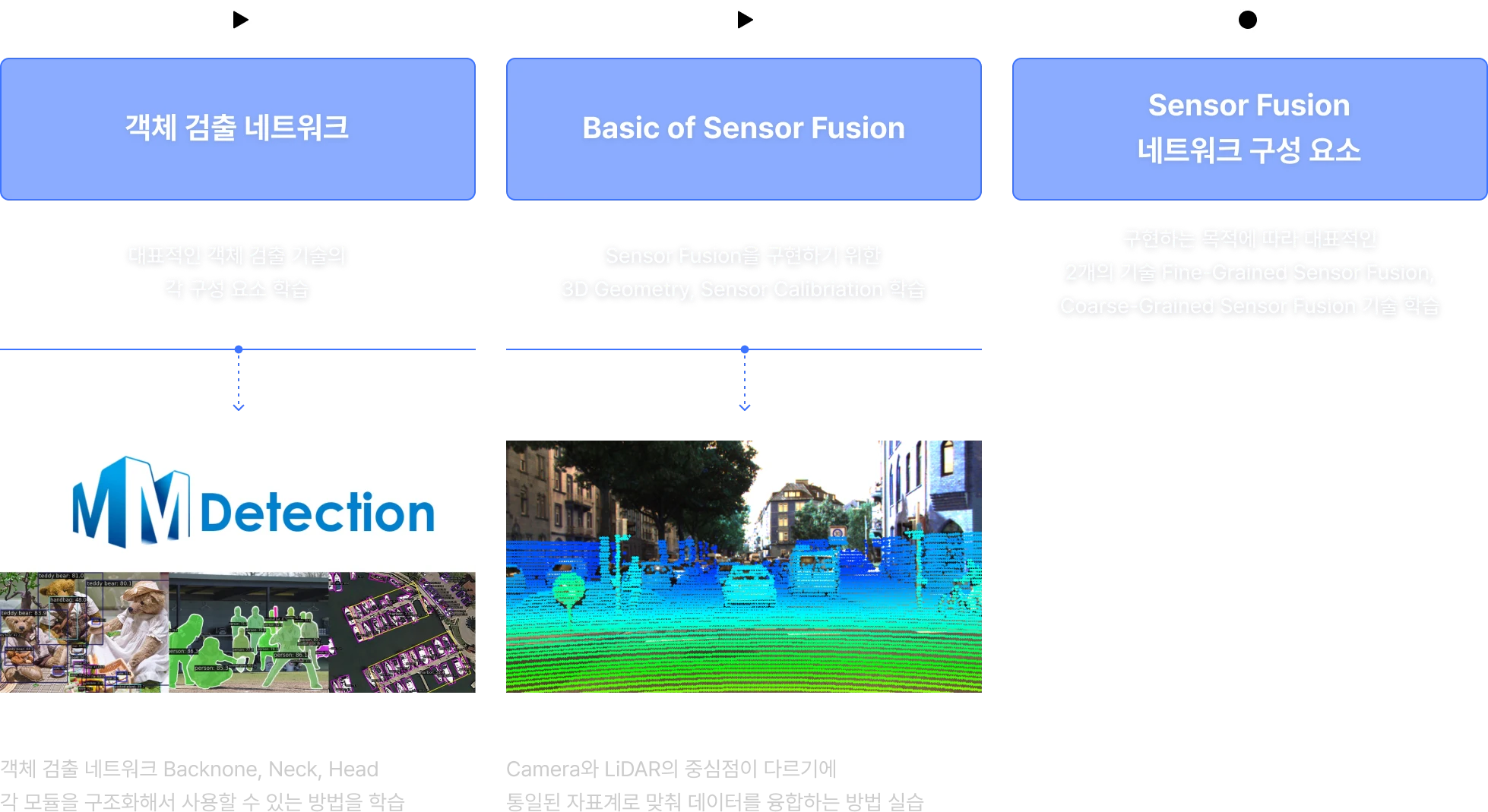

3차원 공간에서 단일 Sensor의 구동 원리를 이해하였다면 네트워크의 객체를 검출하는 특징별로
2가지 Final Project를 통해 다중 Sensor 특징 별 객체를 검출하는 방법을 학습합니다.

Fined Grained Sensor Fusion
카메라와 라이다에서 딥러닝 네트워크를 통해 카메라와 라이다에서 각각 추출한
피처 정보를 융합하여 3차원 장애물울 검출합니다. 각 센서의 특징과 장점을 고려하여
어떻게 네트워크를 설계하고 피쳐를 융합하는 것이 좋을지 학습합니다.
Coarse Grained Sensor Fusion
각각 동작하는 카메라와 라이다 기반 객체검출 네트워크의 검출 결과를 융합하여
3차원 장애물을 검출합니다. 독립적으로 검출된 두 검출 결과를 어떻게 융합해야
더 강력한 객체 검출 시스템을 만들 수 있을지 학습합니다.

잠깐! 넘어가기 전, Sensor Fusion 파트 강사님의 강의에 대한 한 마디
Sensor Fusion Track Resarcher ‘김영석 님’
1. Sensor Fusion을 학습하면서 겪는 가장 큰 어려움은 단일 Sensor와 다중 Sensor의 각 특징을 이해하는 것이기에 해당 부분을
더 깊게 강의에서 짚고 넘어가게 되었습니다.
2. 그렇기에 제 강의에서는 단일 Sensor 및 다중 Sensor의 특성을 이해하고 이를 기반으로 대표적인 4가지 사례의 실습을 진행합니다.

고화질의 지도 생성과 위치 추정을 위한 SLAM 구현
3차원 공간 데이터와 위치 정보를 얻어
지도 기반 위치 추정 애플리케이션을 구현해볼 수 있는 기술 실습

3차원 공간을
표현하는 방법
3D 공간 속에서 자동차의 방향과 위치를 수학적으로 표현할 수 있는 방법을 직접 실습합니다.
3D 공간 속에서 자동차의 방향과 위치를 수학적으로 표현할 수 있는 방법을 직접 실습합니다.
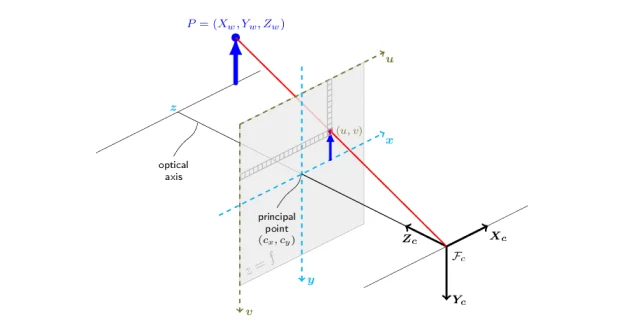
Camera와 LiDAR의 데이터를
표현하는 방법
3D 공간 속 물체를 바라보고 있는 카메라가 2D 이미지에서 물체를 어떻게 표현하는지 학습합니다.
3D 공간 속 물체를 바라보고 있는 카메라가 2D 이미지에서 물체를 어떻게 표현하는지 학습합니다.

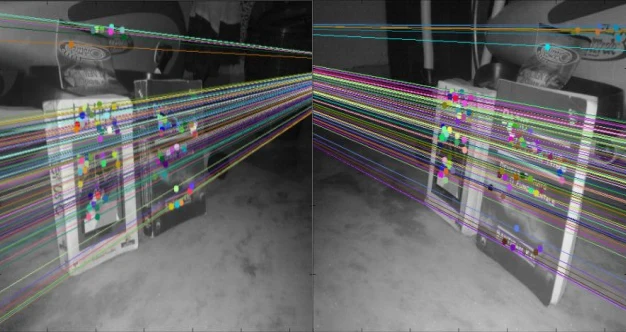
랜드마크 구성
SLAM에서 3d 공간의 지도를 구성하는 랜드마크를 추론하기 위한 local feature 검출을 실습합니다.
SLAM에서 3d 공간의 지도를 구성하는 랜드마크를 추론하기 위한 local feature 검출을 실습합니다.

Loop Detection & Relocalization
이미지 속 특징점을 이용하여 이전에 와본 적이 있는 장소인지 구분하는 방법을 학습합니다.
이미지 속 특징점을 이용하여 이전에 와본 적이 있는 장소인지 구분하는 방법을 학습합니다.

Feature Tracking
자동차가 움직이면서 변화하는 이미지 속 검출했던 특징점을 추적하는 방법을 학습합니다.
자동차가 움직이면서 변화하는 이미지 속 검출했던 특징점을 추적하는 방법을 학습합니다.

ICP
자동차가 움직이면서 얻게 되는 LiDAR Sensor에서 Point Cloud 회전과 이동을 연산하여 자동차의
이동 거리를 계산하는 방법을 학습합니다.
자동차가 움직이면서 얻게 되는 LiDAR Sensor에서 Point Cloud 회전과 이동을 연산하여 자동차의
이동 거리를 계산하는 방법을 학습합니다.
Voxel Processing
Point Cloud 데이터를 기반으로 다양한
알고리즘을 학습하여 3D 공간의 격자 형태로 나눠
3D 지도를 만드는 방법을 학습합니다.
Point Cloud 데이터를 기반으로 다양한
알고리즘을 학습하여 3D 공간의 격자 형태로 나눠
3D 지도를 만드는 방법을 학습합니다.

Epipolar Geometry
Visual SLAM은 첫 2개 시점의 이미지 연산이 제일 중요합니다. 그래서 첫 2개 시점 이미지의 회전과 이동 거리 연산 방법을 학습하고 지도를 구성합니다.
Visual SLAM은 첫 2개 시점의 이미지 연산이 제일 중요합니다. 그래서 첫 2개 시점 이미지의 회전과 이동 거리 연산 방법을 학습하고 지도를 구성합니다.

Homography
Epipolar Geometry가 형성된 상황에서
3D 공간이 평면인 경우에 2개의 시점 간 회전과
이동 거리를 연산하는 방법을 학습합니다.
Epipolar Geometry가 형성된 상황에서
3D 공간이 평면인 경우에 2개의 시점 간 회전과
이동 거리를 연산하는 방법을 학습합니다.
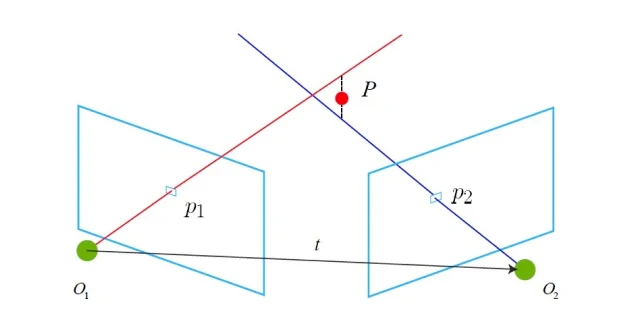
Triangulation
점차 지도를 확장해나가는 특징을 활용합니다.
첫 2개 시점 사이 회전과 이동 거리를 계산하며
지도를 만드는 방법을 학습합니다.
점차 지도를 확장해나가는 특징을 활용합니다.
첫 2개 시점 사이 회전과 이동 거리를 계산하며
지도를 만드는 방법을 학습합니다.
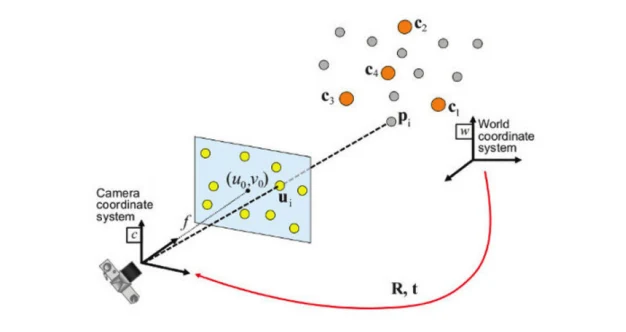
Persepective-n-Points(PnP)
SLAM으로 특정 공간에 대한 지도를 만든 후에
해당 공간 속에서 지도를 바라보며 위치를
추정하는 방법을 학습합니다.
SLAM으로 특정 공간에 대한 지도를 만든 후에
해당 공간 속에서 지도를 바라보며 위치를
추정하는 방법을 학습합니다.
Least squares
수 많은 데이터들로부터 단 하나의 지도와 이동 경로를 추정하는 SLAM의 특성으로 다수의 선택지로부터 최적의 이동 경로를 얻는 방법을 학습합니다.
수 많은 데이터들로부터 단 하나의 지도와 이동 경로를 추정하는 SLAM의 특성으로 다수의 선택지로부터 최적의 이동 경로를 얻는 방법을 학습합니다.
Bundle adjustment
카메라의 이미지 데이터로부터 3차원 공간에 나타난 정보들로 지도를 구성할 때 카메라 위치와 3차원 공간
각 점군들의 위치를 추정하는 방법을 학습합니다.
카메라의 이미지 데이터로부터 3차원 공간에 나타난 정보들로 지도를 구성할 때 카메라 위치와 3차원 공간
각 점군들의 위치를 추정하는 방법을 학습합니다.
RANSAC
SLAM을 활용하여 지도를 만들 때,
각 Sensor 이상치 데이터 속 자동차의 움직임을
올바르게 추정하는 방법을 학습합니다.
SLAM을 활용하여 지도를 만들 때,
각 Sensor 이상치 데이터 속 자동차의 움직임을
올바르게 추정하는 방법을 학습합니다.
Camera와 LiDAR Sensor를 활용하여 SLAM이 어떻게 구동되는지 학습하였다면,
6개의 Final Project를 통해 3D 공간에서 두 가지 대표 Sensor인 Camera & LiDAR
기반으로 지도를 생성하는 방법을 학습합니다.
Visual(Camera) SLAM
Visual SLAM은 카메라 영상만을 이용하여 코너(Corner)와 엣지(Edge)같은 영상의 특징들을 이용하여 위치를 추정합니다.
ORB SLAM
3개의 스레드(위치 추정, 지도 생성, 루프 결합)로 구성된 병렬 시스템을 활용하여
위치 추정 & 지도 생성 기술을 학습합니다. 카메라 센서 기반 검출 이미지에서
특징점(Key Point)을 검출하여 지도를 작성하고 위치 추정 방법을 학습합니다.

DynaVINS
대부분의 SLAM 기술은 움직이는 객체(반대편에서 오는 자동차, 사람 등)가
존재할 때 지도 생성에 어려움을 겪을 수 있습니다. 그렇지만 DynaVINS을
학습하면서 IMU 센서를 활용하여 안정적으로 위치를 추정하는 방법을 학습합니다.
Cube SLAM
컴퓨터 비전 기반 딥러닝 객체 검출 결과를 활용하여 지도를 생성하는 기술입니다.
3D Bounding Box로 지도를 구성하여 3차원 공간에서 다른 차량의 위치를
바로 인식하고 장애물을 피해다니면서 주행할 수 있는 방법을 학습합니다.
LiDAR SLAM
LiDAR SLAM은 센서를 이용하여 현 위치인 노드를 생성하고 이전 노드와 현 노드를 이어주는 Edge를 통해 그래프를 생성하여 위치를 추정합니다.
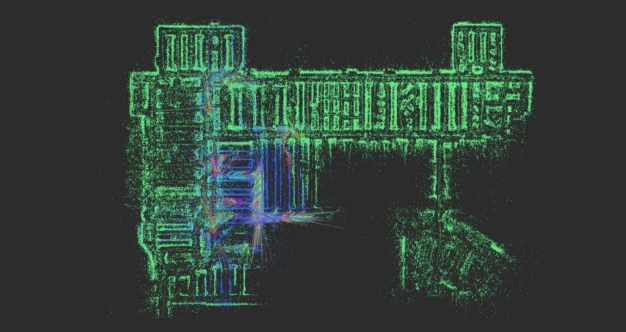
HDL Graph SLAM
3D 공간에서 LiDAR 센서를 이용하여
고화질 지도를 생성할 때 사용하는 기술을 학습합니다.
고화질 지도를 생성할 때 사용하는 기술을 학습합니다.
KISS-ICP
LiDAR 센서로 HDL Graph SLAM에 비해 연산량을 덜 사용하면서
자동차의 위치를 실시간으로 추정하는 기술을 학습합니다. 연산량을 줄여 주행함으로써
자율주행 차량에서 실시간으로 위치를 추정하는 방법을 학습합니다.

SHINE Mapping
큰 규모의 지도를 구성하기 위해서는 대용량 메모리를 활용해야 하기에 비용적인
리소스가 많이 들게 됩니다. 이러한 문제를 해결하기 위해 적은 데이터로도
딥러닝을 활용하여 풍부한 지도를 생성할 수 있는 방법을 학습합니다.

잠깐! 넘어가기 전, 자율주행 소프트웨어를 구현하기 위한 +Tip 강의도 같이 드립니다.
SLAM Track Engineer ‘장형기 님’
1. 다수의 모듈이 복잡하게 얽혀 동작하는 자율주행 소프트웨어를 만들기 위해서는
꼭 각각의 모듈마다 테스팅을 거쳐
안전성을 확보하는 것이 중요합니다.
2. 그렇기에 최소한의 버그와 시행착오를 겪으면서 다수의 모듈이 복잡하게 얽혀있는 자율주행 소프트웨어를 개발하기 위한
시스템 구축 방법을 학습합니다.
3. 실수를 줄이면서 자율주행 소프트웨어 개발이 가능한 CI(지속적 통합) 시스템을 구축하는 법을 학습할 수 있습니다.

차량의 안전, 효율, 승차감을 고려하여 자율주행 개발이 가능한
Motion Planning & Control
판단에 필요한 인지 정보를 가지고 적절한 거동 계획과 차량을 제어하는 기술 실습



주차 상황에서의 경로 계획(Free Space)
Free Space인 주차장에서 초기 위치에서 목적지까지 차량이 주행하기 적절한 최적 경로를 계획하는 방법을 실습합니다.
Free Space인 주차장에서 초기 위치에서 목적지까지 차량이 주행하기 적절한 최적 경로를 계획하는 방법을 실습합니다.
도로 상황에서의 경로 계획(Road Network)
Road Network가 존재하는 도로 환경에서 초기 위치에서 목적지까지 최적 경로를 계획하는 방법을 실습합니다.
Road Network가 존재하는 도로 환경에서 초기 위치에서 목적지까지 최적 경로를 계획하는 방법을 실습합니다.

고속도로 주행 상황에서의 의사결정
고속도로를 주행하고 있는 상황에서 차선을 유지할지, 변경할지 등의 의사결정을 하는 방법을 실습합니다.
고속도로를 주행하고 있는 상황에서 차선을 유지할지, 변경할지 등의 의사결정을 하는 방법을 실습합니다.

고속도로 주행 상황에서의 거동 계획
고속도로를 주행하고 있는 상황에서 결정된 행동을 바탕으로 적절한 거동을 계획하는 방법을 실습합니다.
고속도로를 주행하고 있는 상황에서 결정된 행동을 바탕으로 적절한 거동을 계획하는 방법을 실습합니다.
단일 장애물 추월
앞에 정지하고 있는 객체가 있을 때 목표 경로로 주행하거나 혹은 충돌을 회피하는 추월 거동 방법을 실습합니다.
앞에 정지하고 있는 객체가 있을 때 목표 경로로 주행하거나 혹은 충돌을 회피하는 추월 거동 방법을 실습합니다.
전방/후방 주차
주차장 환경에서 전방/후방 주차를 수해하기 위해 거동을 계획하는 방법을 실습합니다.
주차장 환경에서 전방/후방 주차를 수해하기 위해 거동을 계획하는 방법을 실습합니다.

판단과 제어 알고리즘이 어떻게 구동하고 있는지 원리를 학습하였다면
2개의 Final Project, 도심과 고속도로의 자율주행 상황 시나리오에서
판단 & 제어 시스템 구현하는 방법을 학습합니다.
고속도로에서의 차선 변경
고속도로 환경에서 추월 문제는 안전과 효율이 관련된 복잡한 문제입니다.
자율주행 차량이 주행하고 있는 차선과 주변 차선 차량들의 상태를 고려하여
적절한 판단 후 차선 변경을 수행하는 방법을 학습합니다.
비보호 교차로에서 안전을 고려한 진입/진출
목적지까지 주행하기 위해 비보호 교차로에서 주행하고 있는 차량들을 고려하여,
안전하게 진입/진출하는 것은 어려운 문제입니다. 이러한 문제를 풀기 위해 단계적인
접근을 통해 문제를 해결하는 방법을 학습합니다.

잠깐! 넘어가기 전, Motion Planning & Control 강사님의 강의에 대한 한 마디
Motion Planning & Control Engineer ‘전승민 님’
1. 판단/제어는 차량이라는 실제 시스템과 밀접하게 연관이 되어 있기에 인지 기술보다 조금 더 물리적이고 인과 관계를 중시하는 특성이 있습니다.
2. 그렇기에 문제가 발생하였을 때 문제를 해결하는 실력도 중요하지만, 그 문제를 왜 해결하고 어떻게 풀어나갈 수 있을지 논리적으로 접근하는 능력도 중요합니다.
3. 저의 Motion Planning & Control 강의를 듣게 되실 수강생분들께서는 수강 후에 Motion Planning & Control 세부 모듈 및
아키텍쳐를 이해하며 전체 인과 관계에 대한 깊은 이해를 하실 수 있게 되실 수 있습니다.

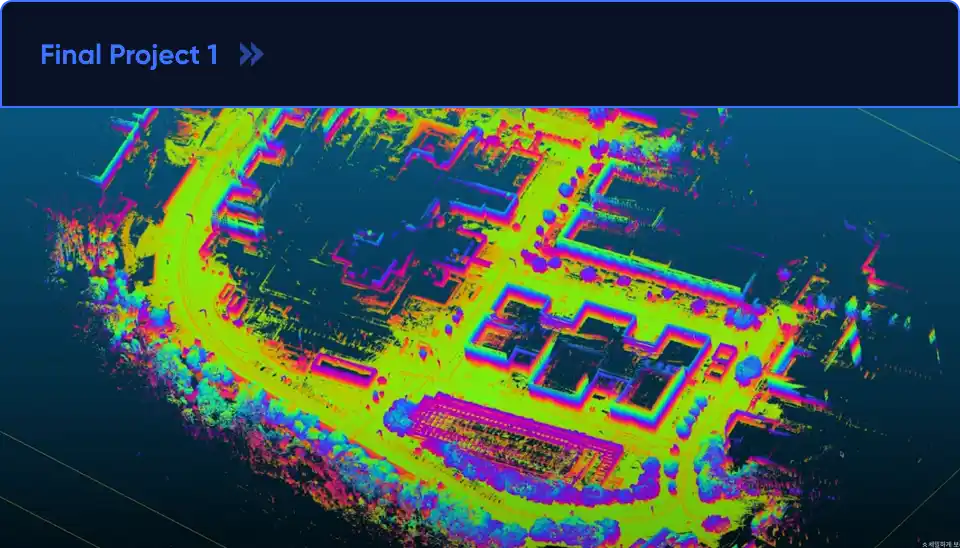
3개의 최종 프로젝트로 마무리하는 자율주행
각 자율주행 Task 모듈의 이해를 넘어서 자율주행을 가능하게 하는
전체 시스템 아키텍쳐를 이해할 수 있는 실습


DSP SLAM을 활용하여
도심 속 고정되어 있는 장애물을 피해서 주행
도심 속 고정되어 있는 장애물을 피해서 주행
새로운 주행 데이터가 들어올 때마다, 계속해서 들어오는
이미지 데이터를 학습해야 하는 문제를 3D 공간에서
Bounding Box를 그려 Auto-Labeling 기술로 자율주행 기능
구현에 있어 학습 비용을 감소하는 방법을 학습합니다.

이미지 데이터를 학습해야 하는 문제를 3D 공간에서
Bounding Box를 그려 Auto-Labeling 기술로 자율주행 기능
구현에 있어 학습 비용을 감소하는 방법을 학습합니다.

SUMA ++를 활용하여 주행 후
다시 해당 위치로 돌아왔을 때
같은 장애물을 인식하면서 주행
다시 해당 위치로 돌아왔을 때
같은 장애물을 인식하면서 주행
Segmentation의 객체 인지 정보와 SLAM의 위치 추정 & 지도 작성이
동시에 가능한 Semantic SLAM으로 객체 분할까지 수행하며 더욱 정확한 지도를 구성하는 방법을 학습합니다.

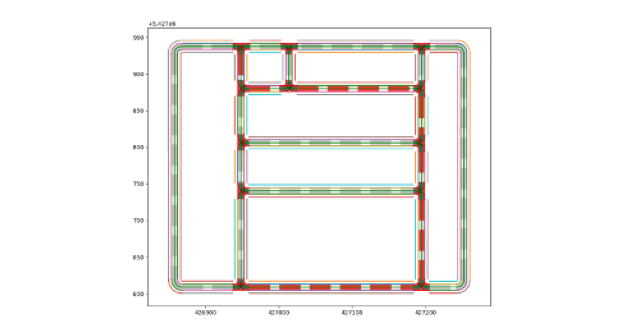
LiDAR Map 과 Path Planning을 융합하여
Auto Valet Parking 서비스 구현
Auto Valet Parking 서비스 구현
차가 다니기에 이상적이지 않은 공간 속에서 자율주행 주차를
하기에는 제약 조건이 많습니다.
이러한 상황 속에서 LiDAR Map을 활용하여 지도를 구성하고,
원하는 목적지로 점을 찍어 현재 위치에서부터 주차 위치까지
자동으로 주행하는 방법을 학습합니다.
하기에는 제약 조건이 많습니다.
이러한 상황 속에서 LiDAR Map을 활용하여 지도를 구성하고,
원하는 목적지로 점을 찍어 현재 위치에서부터 주차 위치까지
자동으로 주행하는 방법을 학습합니다.
자율주행을 위한 컴퓨터비전과 라이다 & 센서퓨전까지 초격차 패키지 Online.
[특별 구성] 자율주행을 위한 로봇 올인원 패키지 (SLAM&컴퓨터비전&라이다&센서퓨전)
미리보기
아직 고민 중이신가요?
강의를 미리보고 결정하세요!
2D LiDAR SLAM
도로 영역 검출 프로젝트
궁금한 내용은 언제든
디스코드 질의응답 채널에 질문하세요!
현직 자율주행 전문 강사님들이 직접 답변 드립니다!

* 교육 내용 범주 안에서만 질의응답 가능합니다.
* 2023년 10월 20일부터 2026년 10월 20일까지 운영됩니다.
아무리 구성이 좋아도 누구나 가르친다면 의미 없죠!
대기업 & 자율주행 유명 기업 실무진과 자율주행 연구원 강사님들로 모셔왔습니다!





-
상세 커리큘럼.
자세한 커리큘럼 및 내용은 여기서 확인하세요!

Q&A
Question 01.
∙ Computer Vision 분야 대학원생 중 자율주행 취업 진출을 원하는 대학원생
∙ 자율주행 관련 기술 엔지니어로 이직하고 싶은 Computer Vision Engineer
∙ 자율주행 관련 기술 엔지니어로 이직하고 싶은 Computer Vision Engineer
Question 02.
필요한
선수지식이 있을까요?
선수지식이 있을까요?
∙ 딥러닝 컴퓨터 비전 주요 알고리즘(Object Detection & Semantic Segmentation & Face Recognition)의 이해
∙ Pytorch & Tensorflow & Keras 프레임워크의 기본적인 사용법 이해
∙ 행렬 연산을 이해하기 위한 기초 선형대수 Python
∙ Linux/Bash
∙ C++ (SLAM Part에서는 SLAM 강의를 이해하기 위한 C++ 강의를 포함합니다.)
∙ Pytorch & Tensorflow & Keras 프레임워크의 기본적인 사용법 이해
∙ 행렬 연산을 이해하기 위한 기초 선형대수 Python
∙ Linux/Bash
∙ C++ (SLAM Part에서는 SLAM 강의를 이해하기 위한 C++ 강의를 포함합니다.)
Question 03.
개발 환경
Part 1. Perception
∙ Google Colab Pro
∙ 부가적으로 GPU가 더 있다면 훨씬 용이합니다.
∙ Visual Studio Code
∙ Anaconda 3
∙ Pytorch & Tensorflow & Keras 프레임워크
Part 2. LiDAR Perception
∙ Linux 환경(Ubuntu 20.04 혹은 Windows 11 + WSL 2)
∙ ROS Noetic & Open 3D • GPU를 사용할 수 있는 환경
∙ Pytorch & Anaconda
Part 3. Sensor Fusion
∙ CUDA GPU가 장착된 Ubuntu (버전 상관없음)
∙ Anaconda
∙ GPU 사용을 위한 NVIDIA 드라이버
Part 4. SLAM
∙ Linux (Ubuntu)
∙ Bash
Part 5. Path Planning & Control
∙ Window/Linux/Mac 무관하게 가능
∙ Visual Studio Code
∙ Pycharm
∙ Google Colab Pro
∙ 부가적으로 GPU가 더 있다면 훨씬 용이합니다.
∙ Visual Studio Code
∙ Anaconda 3
∙ Pytorch & Tensorflow & Keras 프레임워크
Part 2. LiDAR Perception
∙ Linux 환경(Ubuntu 20.04 혹은 Windows 11 + WSL 2)
∙ ROS Noetic & Open 3D • GPU를 사용할 수 있는 환경
∙ Pytorch & Anaconda
Part 3. Sensor Fusion
∙ CUDA GPU가 장착된 Ubuntu (버전 상관없음)
∙ Anaconda
∙ GPU 사용을 위한 NVIDIA 드라이버
Part 4. SLAM
∙ Linux (Ubuntu)
∙ Bash
Part 5. Path Planning & Control
∙ Window/Linux/Mac 무관하게 가능
∙ Visual Studio Code
∙ Pycharm
커리큘럼
아래의 모든 강의를 초격차 패키지 하나로 모두 들을 수 있습니다.
지금 한 번만 결제하고 모든 강의를 평생 소장하세요!
Part1. Perception
Part2. LiDAR Perception
Part3. Sensor Fusion
Part4. SLAM
Part5. Motion Planning & Control
Part6. 자율주행 3종 최종 프로젝트
자율주행을 위한 컴퓨터비전과 라이다 & 센서퓨전까지 초격차 패키지 Online.
[특별 구성] 자율주행을 위한 로봇 올인원 패키지 (SLAM&컴퓨터비전&라이다&센서퓨전)