(현) 기업 전문 교육기관 로보틱스 엔지니어링 강사
(전) K-Digital Training: 자율주행 데브코스 강사
(전) 로보틱스 스타트업 S/W 엔지니어 및 테크리드

하드웨어 이해부터 최신 AI 자율주행 로봇 응용까지, 포트폴리오에 바로 활용 가능한 실물로봇 프로젝트를 중심으로 자율주행 로봇 개발 실무 프로세스와 내용을 학습해봅니다.
이 모든 내용을 한 번에 어디에서 배워야 할지
그 동안 찾지 못하고 헤매고 있으셨나요?

자율주행 로봇 개발 실무의
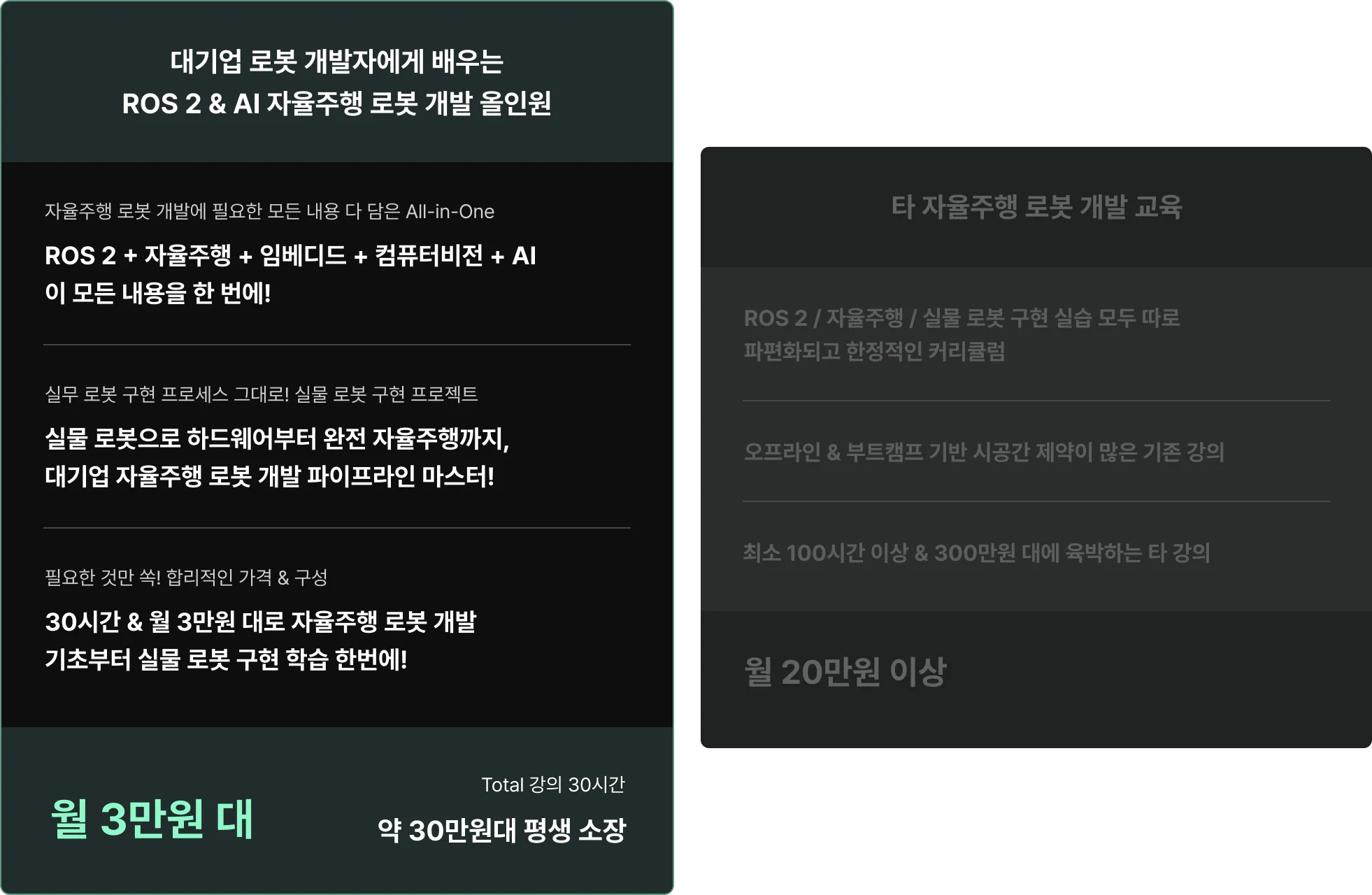
모든 것을 다 담은 올인원 강의입니다
 ROS 2 + 자율주행 + 임베디드 + 컴퓨터비전 + AI 모두 직접 다루어보는
ROS 2 + 자율주행 + 임베디드 + 컴퓨터비전 + AI 모두 직접 다루어보는


강사소개
이 모든 실전 커리큘럼과 노하우를 공유해주실
현직 글로벌 대기업 자율주행 로봇 개발자 강사님을 소개합니다
글로벌 대기업 로봇 연구 개발 전문가 &
패스트캠퍼스 로봇 카테고리 강의 1위 연사님
안녕하세요, 여러분! Robby입니다.
저도 처음 로봇 개발을 공부할 때 “어떤 우선순위로 공부해야 하지?”, 그리고 실무를 하고 있는 지금은
“이런 것들을 미리 누가 알려줬으면 좋았을 텐데”라는 생각을 정말 많이 했었기 때문에 로보틱스 엔지니어로서
현업에서 쌓은 경험을 바탕으로, 여러분께 실질적인 노하우를 제공하고 싶었습니다.
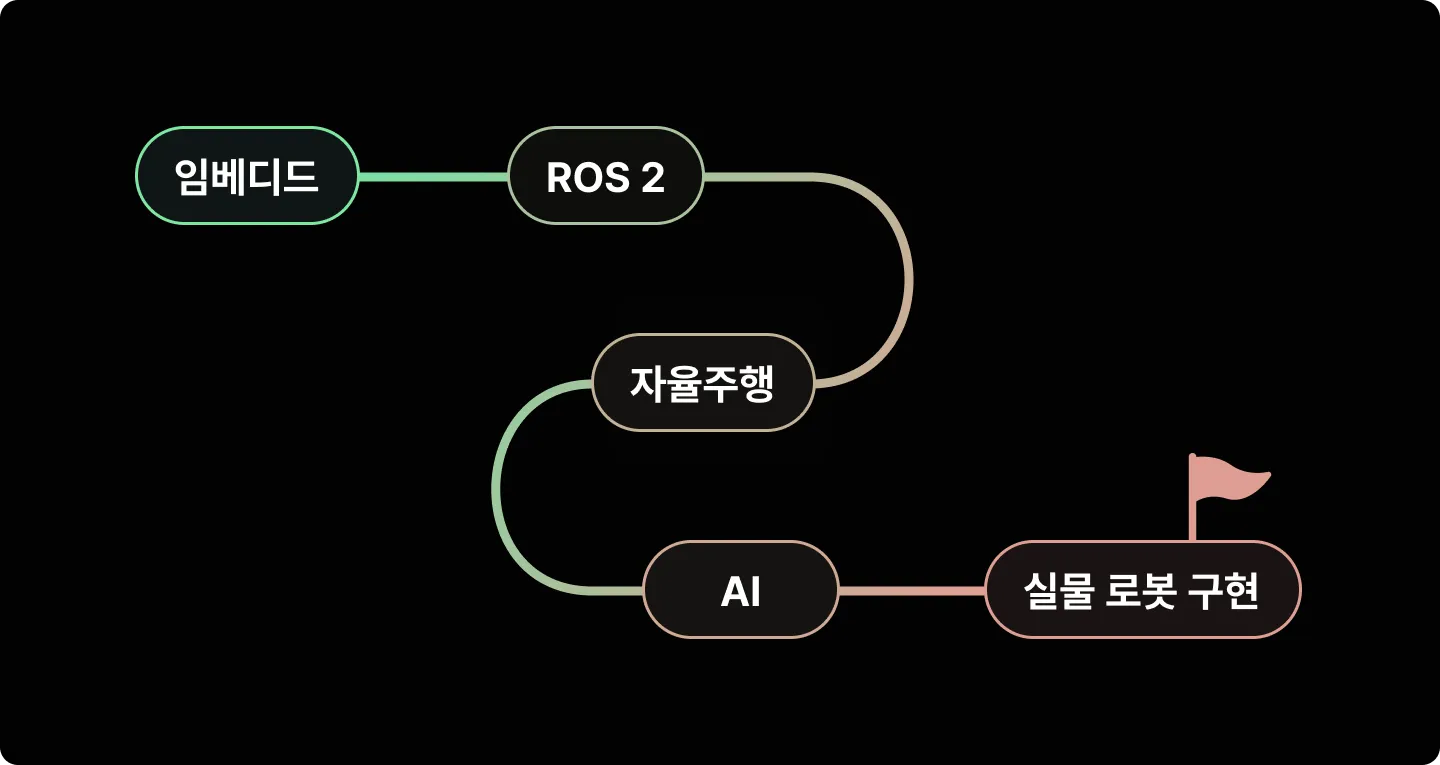
비전공자, 주니어분들이 가장 어려워 하는 것이 로봇 개발 요소 하나하나를 어떻게 공부해야 하는 것인가
일텐데요. 본 강의에서는 로봇을 직접 조립하고 조작하면서 리눅스 기초부터 ROS2, SLAM, Navigation,
AI 활용까지 체계적으로 연결되도록 구성 했습니다.
그리고 실제 로봇을 만들 때 마주치는 케이블 배선, 배터리, 노이즈, 실시간 지연, 센서 한계 등의 현업에서
겪는 짜증나고 또 어려운 문제들을 직접 겪어보고 디버깅 해보시면서 함께 성장해봤으면 좋겠습니다.

패스트캠퍼스 로봇 카테고리 1위 강의 연사님!
따라올 수 없는 인사이트와 퀄리티로
찬사를 받은 Robby님의 강의

| Robby님 다른 강의 살펴보기
학습 포인트
로봇 AI를 이해하고 피지컬 AI를 구현하기 위한
핵심 학습 포인트 4가지

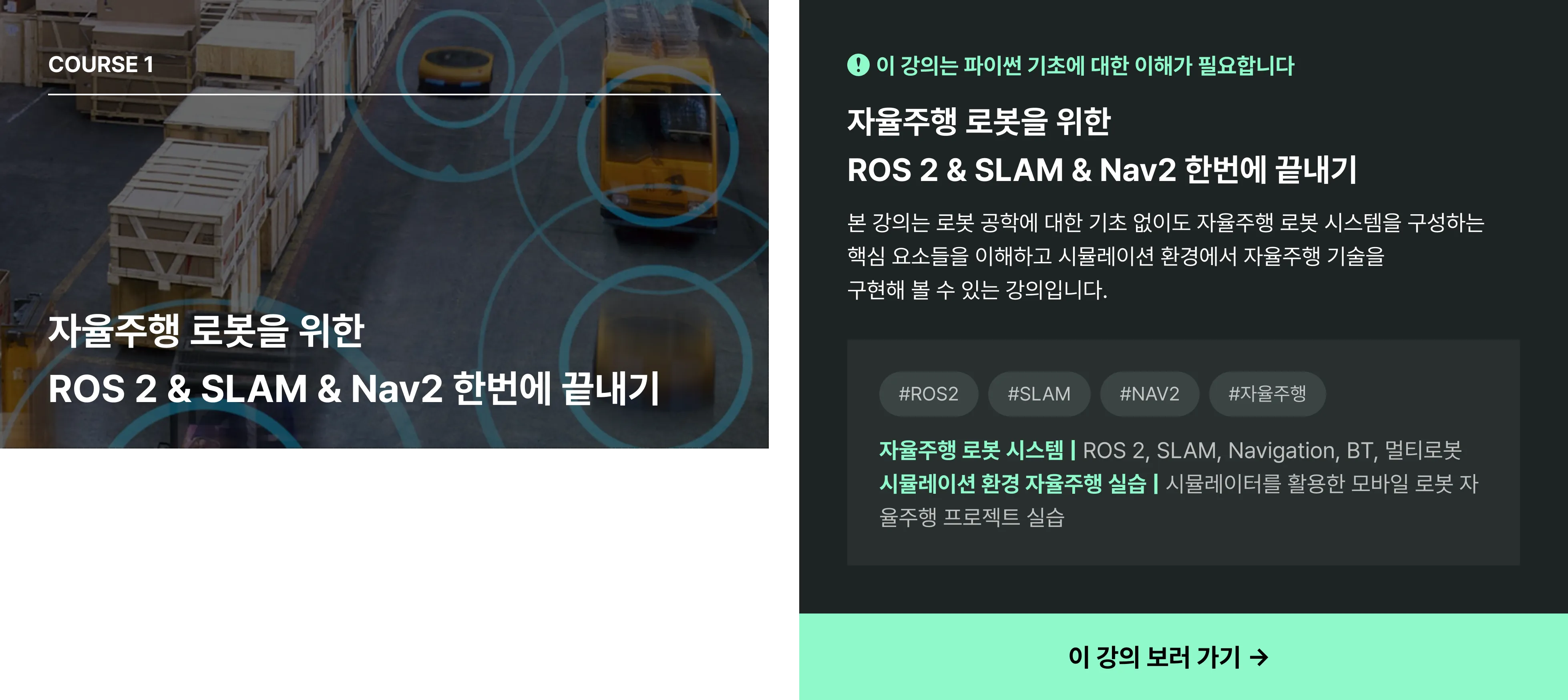
커리큘럼 자율주행 로봇 개발 올인원 로드맵 자율주행 로봇 개발 프로세스 A to Z 모두 한번에 끝내기!
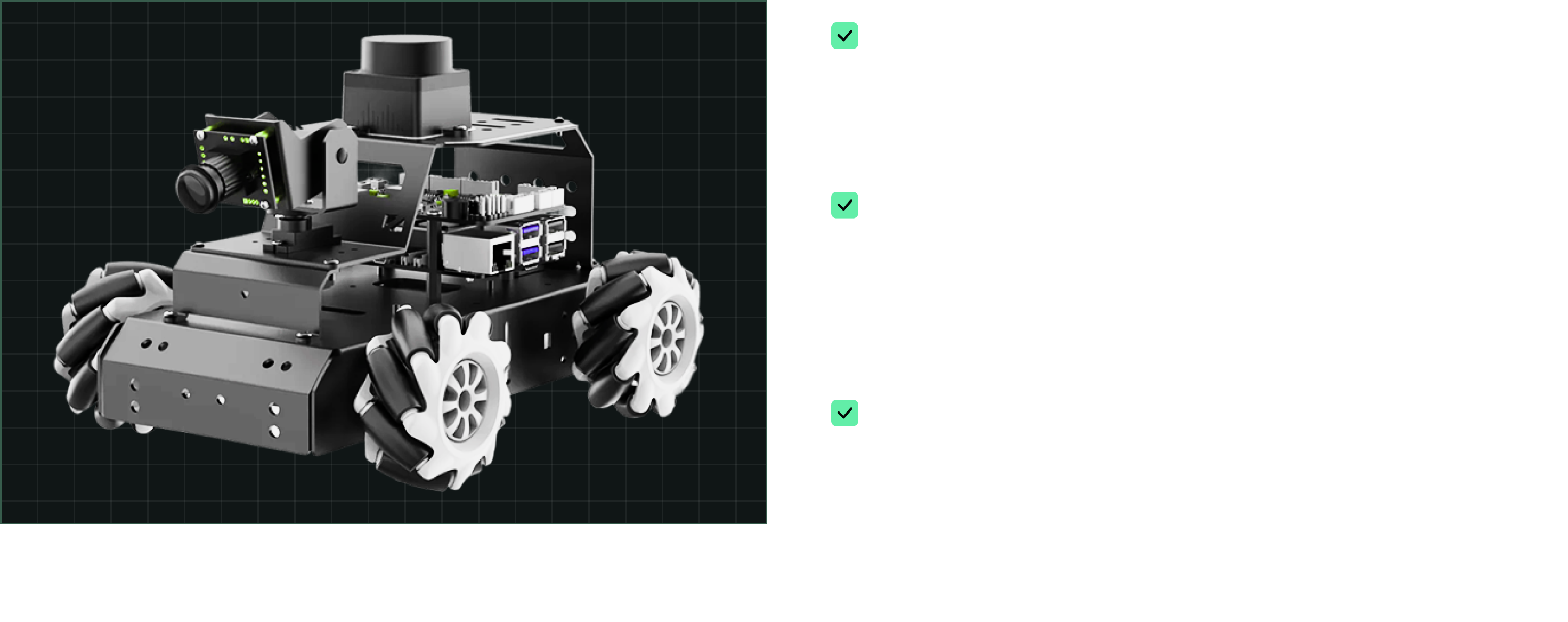
프로젝트 실습 로봇
왜
MentorPI M1 Raspberry Pi Robot Car
로
로봇 구현 프로젝트를 진행하나요?
실무 활용성
실무와 어떻게 연결해 볼 수 있나요?
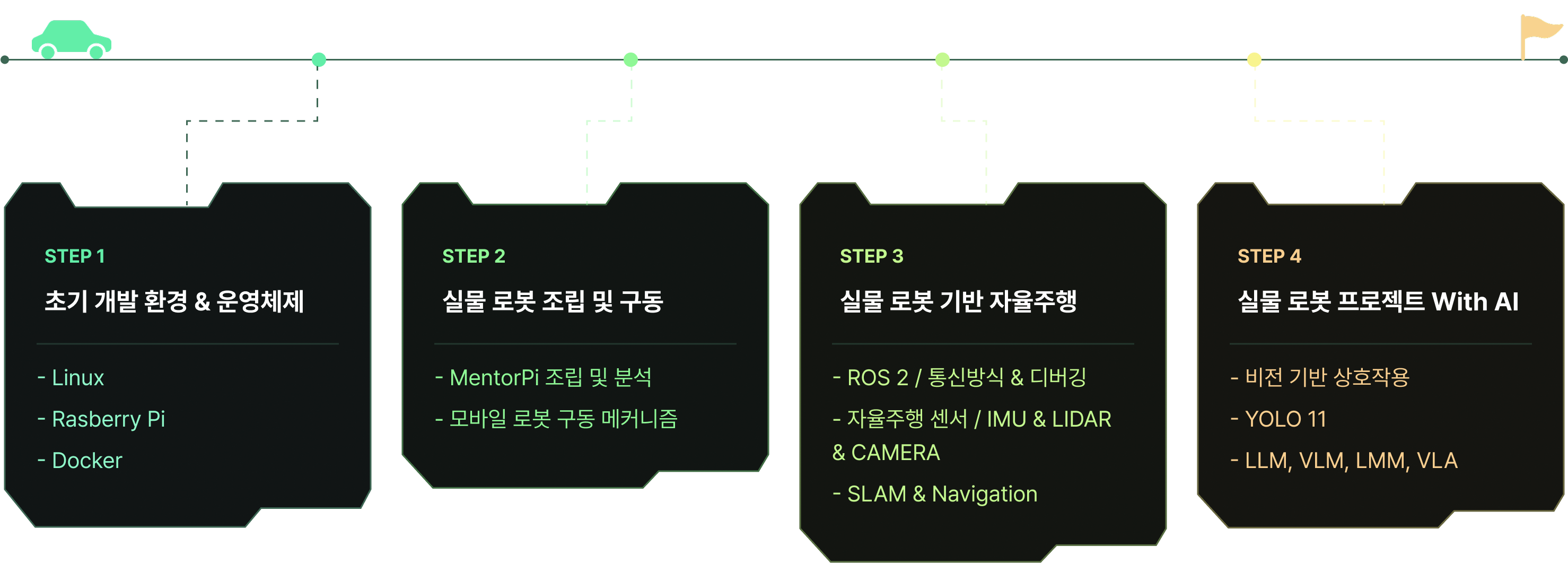
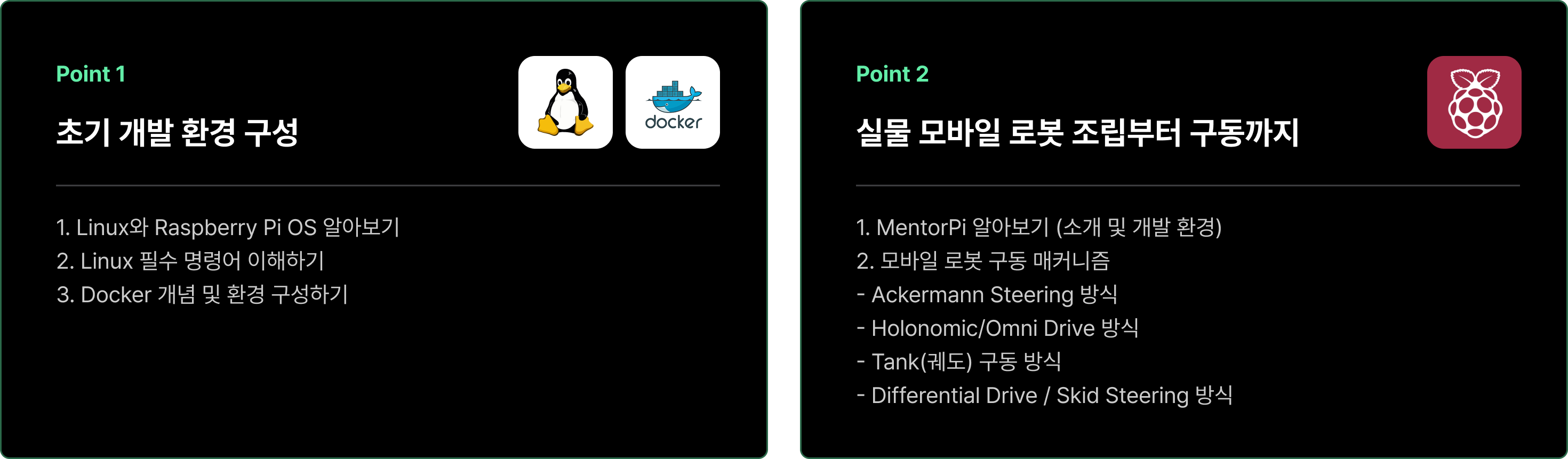
STEP 01
실물 로봇 구현을 위한 환경 세팅 & 로봇 조립
로봇 개발을 위한 가장 기초적인 환경 세팅부터 직접 조립까지,
로봇 하드웨어의 물리적 특성을 이해한 후, 로봇 소프트웨어 개발 진행합니다.
STEP 02
단계별 센서 통합 및 데이터 처리를 위한
ROS 2 & 자율주행 실물 로봇 구현
실제 로봇 시스템에서 요구되는 센서 융합, 노이즈 필터링, 실시간 데이터 처리 등
다양한 센서를 활용한 실물 로봇 구현 프로젝트를 직접 해봅니다.
Point 1.
ROS 2
ROS 2의 Package, Node, Launch부터 Topic, Service, Action 프로그래밍까지
실물 로봇에서 직접 구현하며, 디버깅 도구 활용법을 학습합니다.
Point 2.
자율주행 센서 - LiDAR & Camera
Encoder, IMU, Odometry를 활용한 위치 추정부터 LiDAR 기반 장애물 회피, Camera 기반 색상 인식,
QR 코드 인식, Line Following 등 다양한 센서 프로젝트를 진행합니다.
Project 1. LiDAR 단독 장애물 회피
Project 2. LiDAR 기반 Folllower
Project 3. LiDAR Guarding
Project 1. 색상인식
Project 2. QR 코드 생성 및 인식
Project 3. Line Follower
Project 4. Tracking + Visual Servoing
Project 5. Visual SLAM
Point 3.
자율주행 센서 - SLAM & Navigation
Remote PC 환경 구성, URDF 모델링, SLAM Toolbox를 활용한 Mapping, AMCL
기반 Localization, Nav2를 통한 완전 자율주행을 실물 로봇에서 구현합니다.


STEP 03
파이널 실습 로봇 프로젝트
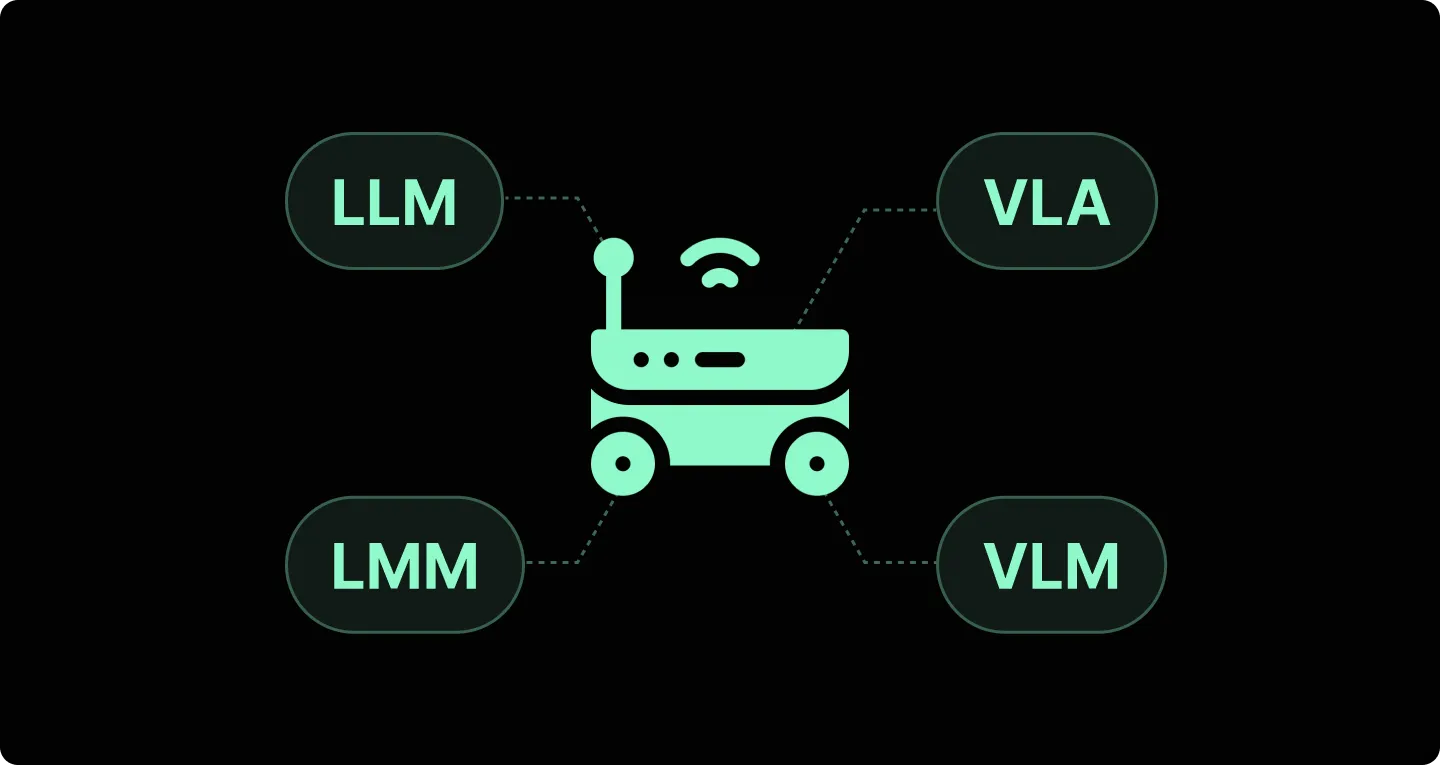
With YOLO11 & AI (LLM,VLM,LMM,VLA)
YOLO11과 LLM 통합 경험을 바탕으로 자연어 명령을 이해하고
수행하는 지능형 로봇 서비스를 개발할 수 있습니다.

FINAL PROJECT 01 인간과 로봇 비전 기반 상호작용
FINAL PROJECT 02 라즈베리파이5에 YOLO11 활용하기
FINAL PROJECT 03 모바일 로봇에 LLM,VLM,LMM,VLA 활용
부가 혜택
오로지 패캠 수강생분들만을 위한
특별한 실습 & 챗봇 자료
스페셜 이벤트
강사님께서 직접 진행하는 1:1 포트폴리오 화상 컨설팅!
연사님께 수강생의 포트폴리오, 졸업작품, 캡스톤 디자인 작품 등 개인 프로젝트를
밀착 피드백을 받을 수 있는 기회!
패키지 상품
시뮬레이션부터 실물 로봇 구현까지 로봇에 모든 것!
한 번에 끝내세요.



질의 응답
커리큘럼
파트 6개클립 104개
학습 규정 및 환불 규정
* 본 상품은 동영상 형태의 강의를 수강하는 상품입니다.
* 상황에 따라 사전 공지 없이 할인이 조기 마감되거나 연장될 수 있습니다.
* 수강 신청 및 결제를 완료하시면, 마이페이지를 통해 바로 수강이 가능합니다.
총 학습기간:
정상 수강기간(유료 수강기간) 최초 30일, 무료 수강 기간은 31일 일차 이후로 무제한이며, 유료 수강기간과 무료 수강기간 모두 동일하게 시청 가능합니다.
본 패키지는 약 29시간 분량으로, 일 1시간 내외의 학습 시간을 통해 정상 수강 기간(=유료 수강 기간) 내에 모두 수강이 가능합니다.
수강시작일: 수강 시작일은 결제일로부터 기간이 산정되며, 결제를 완료하시면 마이페이지를 통해 바로 수강이 가능합니다. (사전 예약 강의는 1차 강의 오픈일)
패스트캠퍼스의 사정으로 수강시작이 늦어진 경우에는 해당 일정 만큼 수강 시작일이 연기됩니다.
일부 강의는 아직 모든 영상이 공개되지 않았습니다. 각 상세페이지 하단에 공개 일정이 안내되어 있습니다.
상황에 따라 사전 공지 없이 할인이 조기 마감되거나 연장될 수 있습니다.
천재지변, 폐업 등 서비스 중단이 불가피한 상황에는 서비스가 종료될 수 있습니다.
본 상품은 기수강생 할인, VIP CLUB 제도 (구 프리미엄 멤버십), 기타 할인 이벤트 적용이 불가할 수 있습니다.
커리큘럼은 제작 과정에서 일부 추가, 삭제 및 변경될 수 있습니다.
쿠폰 적용이나 프로모션 등으로 인해 5만원 이하의 금액으로 강의를 결제할 경우, 할부가 적용되지 않습니다.
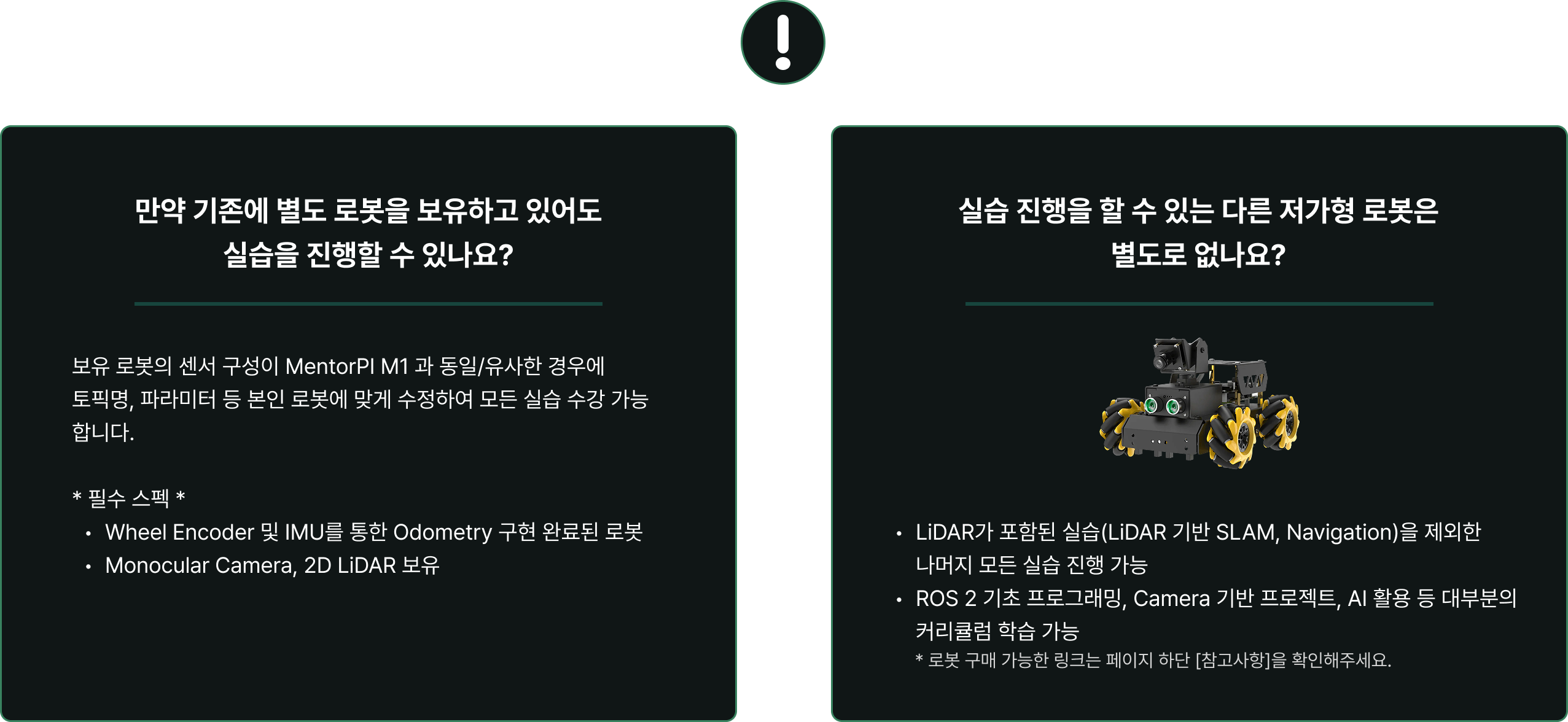
로봇 구매 관련하여 교환/환불/배송 및 AS 정책은 패스트캠퍼스와 관계없이 hiwonder (로봇 구매 사이트) 정책을 따릅니다.
환불금액은 정가가 아닌 실제 결제금액을 기준으로 계산됩니다.
쿠폰을 사용하여 강의를 결제하신 후 취소/환불 시 쿠폰은 복구되지 않습니다.
수강시작 후 7일 이내, 5강 미만 수강 시에는 100% 환불 가능합니다.
수강시작 후 7일 이내, 5강 이상 수강 시 전체 강의에서 수강한 강의의 비율에 해당하는 수강료를 차감 후 환불 가능합니다.
수강시작 후 7일 초과 시 정상 수강기간 대비 잔여일에 대해 아래 환불규정에 따라 환불 가능합니다.
환불요청일 시 기준
: 수강시작 후 1/3 경과 전, 실 결제금액의 2/3에 해당하는 금액 환불
: 수강시작 후 1/2 경과 전, 실 결제금액의 1/2에 해당하는 금액 환불
: 수강시작 후 1/2 경과 후, 환불 금액 없음
* 보다 자세한 환불 규정은 홈페이지 취소/환불 정책에서 확인 가능합니다.
[주의사항]
[ROS 2 & AI 로 끝내는 자율주행 로봇 개발 올인원] 강의와 [피지컬 AI 개발을 위한 VLA & 로봇 특화 LLM 한번에 끝내] 강의로 구성되어 있습니다. (총 38시간 예상)
본 세트 상품 구매 시 VIP CLUB 제도, 페이백 쿠폰 등 별도 이벤트 또는 쿠폰 적용이 불가합니다.
묶음(패키지) 강의 내 일부 동일한 커리큘럼 또는 강의자료가 포함되어 있을 수 있으니, 개별 강의 상세페이지를 꼭 확인해 주세요.
본 묶음 판매는 당사 사정에 따라 별도 고지 없이 변경 또는 종료될 수 있습니다.
[수강 안내]
구매 이후 해당 강의가 내 강의보기에 반영되기까지 10~15분 소요될 수 있습니다.
패스트캠퍼스 온라인 강의는 인터넷 연결 환경에서 수강할 수 있습니다.
천재지변, 폐업 등 서비스 중단이 불가피한 상황에는 서비스가 종료될 수 있습니다.
커리큘럼은 제작 과정에서 일부 추가, 삭제 및 변경될 수 있습니다.
[학습 규정]
본 상품은 동영상 형태의 강의를 수강하는 상품입니다.
해당 강의는 사전 예약 상품으로, 강의 영상이 공개 일정에 따라 순차적으로 제작되어 오픈됩니다.
또는 수강 신청 및 결제를 완료하시면, 마이페이지를 통해 바로 수강이 가능합니다.
[총 학습기간]
본 상품은 온라인 단과 강의를 묶어 추가 할인을 제공하는 패키지로, 정상 수강기간(유료 수강기간) 최초 60일, 무료 수강 기간은 61일차 이후로 무제한이며, 유료 수강기간과 무료 수강기간 모두 동일하게 시청 가능합니다.
수강 시작일: 결제일로부터 기간이 산정되며, 결제를 완료하시면 마이페이지를 통해 바로 수강이 가능합니다. (사전 예약 강의는 최초 1차 강의 오픈일)
패스트캠퍼스의 사정으로 수강시작이 늦어진 경우에는 해당 일정만큼 수강 시작일이 연기됩니다.
일부 강의는 아직 모든 영상이 공개되지 않았습니다.
각 상세페이지 하단에 공개 일정이 안내되어 있습니다.
[환불 규정]
환불금액은 정가가 아닌 실제 결제금액을 기준으로 계산됩니다.
수강시작 후 7일 이내, 5강 미만 수강 시에는 100% 환불 가능합니다.
수강시작 후 7일 이내, 5강 이상 수강 시 전체 강의에서 수강한 강의의 비율에 해당하는 수강료를 차감 후 환불 가능합니다.
수강시작 후 7일 초과 시 정상 수강기간 대비 잔여일에 대해 아래 환불규정에 따라 환불 가능합니다.
환불요청일 기준
: 수강시작 후 1/3 경과 전, 실 결제금액의 2/3 환불
: 수강시작 후 1/2 경과 전, 실 결제금액의 1/2 환불
: 수강시작 후 1/2 경과 후, 환불 불가
※ 본 이벤트는 패키지로 할인을 추가 적용하여 판매하므로 강의의 개별 환불은 불가하며, 패키지의 환불 가능 기간 내 환불 요청 시 위 기준에 따라 반영됩니다.
[주의사항]
[ROS 2 & AI 로 끝내는 자율주행 로봇 개발 올인원] 강의와 [자율주행 로봇을 위한 ROS 2 & SLAM & Nav2 한번에 끝내기] 강의로 구성되어 있습니다. (총 54시간 예상)
본 세트 상품 구매 시 VIP CLUB 제도, 페이백 쿠폰 등 별도 이벤트 또는 쿠폰 적용이 불가합니다.
묶음(패키지) 강의 내 일부 동일한 커리큘럼 또는 강의자료가 포함되어 있을 수 있으니, 개별 강의 상세페이지를 꼭 확인해 주세요.
본 묶음 판매는 당사 사정에 따라 별도 고지 없이 변경 또는 종료될 수 있습니다.
[수강 안내]
구매 이후 해당 강의가 내 강의보기에 반영되기까지 10~15분 소요될 수 있습니다.
패스트캠퍼스 온라인 강의는 인터넷 연결 환경에서 수강할 수 있습니다.
천재지변, 폐업 등 서비스 중단이 불가피한 상황에는 서비스가 종료될 수 있습니다.
커리큘럼은 제작 과정에서 일부 추가, 삭제 및 변경될 수 있습니다.
[학습 규정]
본 상품은 동영상 형태의 강의를 수강하는 상품입니다.
해당 강의는 사전 예약 상품으로, 강의 영상이 공개 일정에 따라 순차적으로 제작되어 오픈됩니다.
또는 수강 신청 및 결제를 완료하시면, 마이페이지를 통해 바로 수강이 가능합니다.
[총 학습기간]
본 상품은 온라인 단과 강의를 묶어 추가 할인을 제공하는 패키지로, 정상 수강기간(유료 수강기간) 최초 60일, 무료 수강 기간은 61일차 이후로 무제한이며, 유료 수강기간과 무료 수강기간 모두 동일하게 시청 가능합니다.
수강 시작일: 결제일로부터 기간이 산정되며, 결제를 완료하시면 마이페이지를 통해 바로 수강이 가능합니다. (사전 예약 강의는 최초 1차 강의 오픈일)
패스트캠퍼스의 사정으로 수강시작이 늦어진 경우에는 해당 일정만큼 수강 시작일이 연기됩니다.
일부 강의는 아직 모든 영상이 공개되지 않았습니다.
각 상세페이지 하단에 공개 일정이 안내되어 있습니다.
[환불 규정]
환불금액은 정가가 아닌 실제 결제금액을 기준으로 계산됩니다.
수강시작 후 7일 이내, 5강 미만 수강 시에는 100% 환불 가능합니다.
수강시작 후 7일 이내, 5강 이상 수강 시 전체 강의에서 수강한 강의의 비율에 해당하는 수강료를 차감 후 환불 가능합니다.
수강시작 후 7일 초과 시 정상 수강기간 대비 잔여일에 대해 아래 환불규정에 따라 환불 가능합니다.
환불요청일 기준
: 수강시작 후 1/3 경과 전, 실 결제금액의 2/3 환불
: 수강시작 후 1/2 경과 전, 실 결제금액의 1/2 환불
: 수강시작 후 1/2 경과 후, 환불 불가
※ 본 이벤트는 패키지로 할인을 추가 적용하여 판매하므로 강의의 개별 환불은 불가하며, 패키지의 환불 가능 기간 내 환불 요청 시 위 기준에 따라 반영됩니다.
[패스트캠퍼스 아이디 공유 금지 정책]
패스트캠퍼스의 모든 온라인 강의에서는 1개의 아이디로 여러명이 공유하는 형태를 금지하고 있습니다.
동시접속에 대한 기록은 내부 시스템을 통해 자동으로 누적되며, 이후 서비스 이용이 제한될 수 있습니다.
[기기제한 정책]
패스트캠퍼스 온라인 강의 시청을 위해서는 ID별 최대 4개의 기기를 등록할 수 있으며, 기기 등록은 온라인 강의장 접속 시 자동 등록됩니다.
최대 갯수를 초과하였을 경우 등록된 기기 해제가 필요합니다.
[저작권 정책]
패스트캠퍼스의 모든 강의는 무단 배포 및 가공하는 행위, 캡쳐 및 녹화하여 공유하는 행위, 무단으로 판매하는 행위 등 일체의 저작권 침해 행위를 금지합니다.
부정 사용이 적발될 경우 저작권법 위반에 의한 법적인 제재를 받으실 수 있습니다.
국내 7개 카드사 12개월 무이자 할부 지원! (간편 결제 제외)