
자율주행 로봇을 위한 ROS 2 & SLAM & Nav2 한번에 끝내기
자율주행
로봇

ONLINE #로보틱스 #자율주행 #ROS2 #SLAM #NAV2
자율주행 로봇을 위한 ROS 2 & SLAM & Nav2 한번에 끝내기
ROS 2 부터 SLAM & Navigation2까지 모두 학습한 후,
시뮬레이터를 활용한 실무 프로젝트까지 한번에!
 기본 정보
기본 정보
∙ 사전지식 필요 - 파이썬 기초 (필수 아님)
∙ 실습환경
Ubuntu 22.04 LTS (사전 설치 필수, 가상환경 비권장)
ROS 2 Humble
Gazebo Classic (11.0.0)
Visual Studio Code
 강의 특징
강의 특징
∙ 부가 학습 자료 제공
자율주행 로봇을 위한 ROS2 & Nav2 한번에 끝내기
[특별 구성] ROS2 올인원 패키지
[특별 구성] 피지컬 AI & 자율주행 로봇 올인원 패키지 (VLA + LLM + ROS2 + SLAM + Nav2)
제조, 물류 등 다양한 작업 현장에서 주로 활용 되던 로봇은,
어느 덧 길거리, 우리 동네, 집안까지 들어오면서
우리의 삶과 한층 더 가까워지고 있습니다


자율주행 배달로봇

자율주행 로보택시
휴머노이드

이처럼, 로봇은 인간이 하는 일을 대신 수행하고 도와주는 것을 넘어
자율적으로 소통할 수 있는 단계로 점점 이동하고 있습니다.
 로봇의 핵심적인 역할?
로봇의 핵심적인 역할?

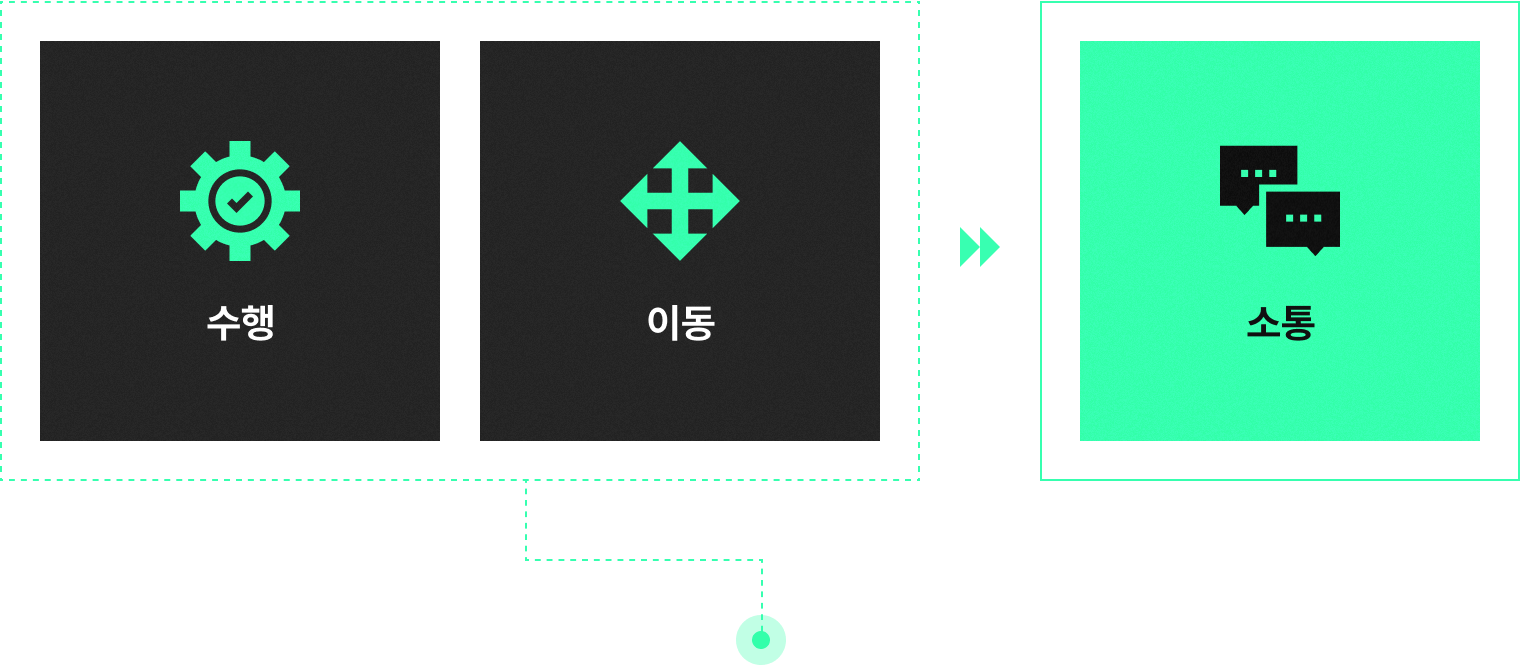
‘수행’, ‘이동’ 가장 핵심적인 두가지 역할들을
함께 다루고 있는 로봇 기술이 바로
로봇 자율주행
스스로 학습을 통해 직접 판단하고 제어하며,
혼자서 이동하고 업무까지 수행할 수 있는 핵심 기술
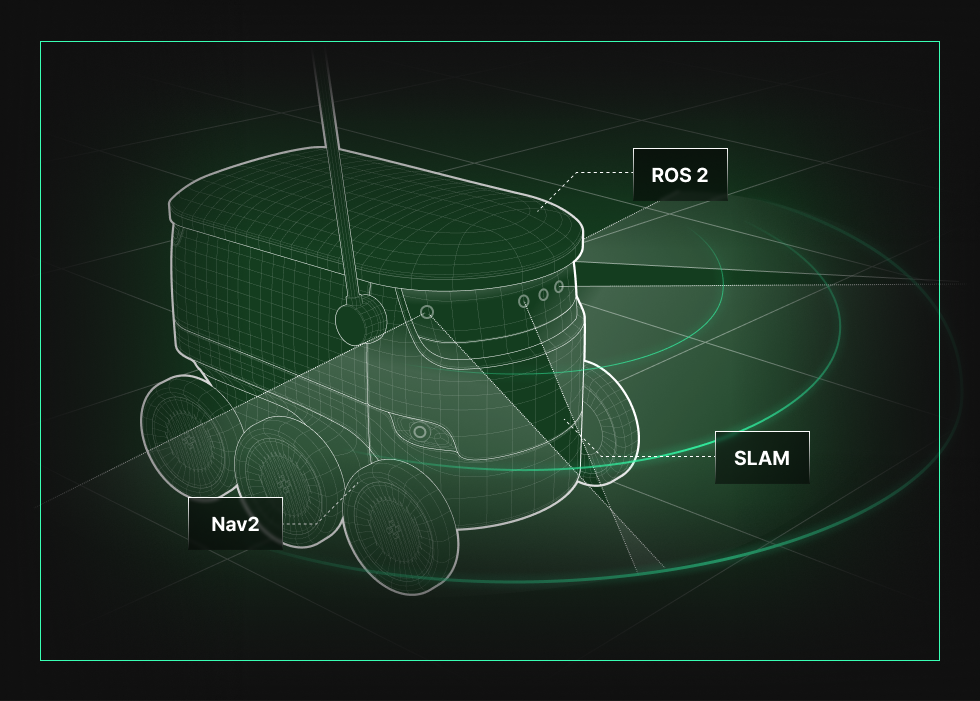
로봇 세계에 입문하시는 분들을 위해, 로봇 개발의 시작점
자율주행 기술에 필요한 모든 내용을 담았습니다.

CHECK POINT
ROS 2 부터 SLAM & Navigation 까지 모두 학습한 후,
시뮬레이터를 활용한 실무 프로젝트까지 한번에!
타사보다 저렴한 가격대로 압도적인 퀄리티의 강의를 제공합니다.
지금 가장 저렴한 금액에 한 번만 결제하고,
[자율주행 로봇을 위한 ROS 2 & SLAM & Nav2 한번에 끝내기] 의 모든 강의를 평생소장하세요!
지금 가장 저렴한 금액에 한 번만 결제하고,
[자율주행 로봇을 위한 ROS 2 & SLAM & Nav2 한번에 끝내기] 의 모든 강의를 평생소장하세요!
POINT 1
로봇 세계 입문의 필수조건 ROS 2!
기초 개념부터 활용방법까지 All-in-One
자율주행 로봇 시스템 설계 및 개발에 필수적인 ROS 2 기초 개념 및 활용 방법과 함께 SLAM, Navigation까지 함께 학습하며,
자율주행 로봇 개발 학습에 필요한 핵심 개념들을 함께 학습해봅니다.
| ROS가 아닌 왜 ROS 2 배워야 하나요?
로봇 시스템 개발에 필요한 뛰어난 성능 및 확장성 제공
ROS는 실시간 성능이 요구되는 시스템에서 사용하기 어려운 반면, ROS 2는 실시간 통신을 지원합니다. 이를 통해 자율 주행 차량이나 산업용 로봇과 같이 실시간 제어가 중요한 애플리케이션에서 적합합니다.
실시간 시스템 지원 및 보안 & 네트워크 안정성 개선
ROS 2는 기본적으로 보안 통신(예: 암호화된 메시지 전송)을 지원하는 설계가 되어 있습니다. 특히 로봇이 산업용 IoT 환경이나 네트워크 기반 환경에서 운용될 경우 보안이 중요한 요소인만큼 ROS 2가 더 적합합니다.
다양한 플랫폼 연동 및 지원
ROS 2 는 Windows/MacOS 지원이 강화되어 로봇 개발자들이 다양한 운영체제에서 작업할 수 있습니다. 또한, 다양한 임베디드 시스템과 잘 통합될 수 있어 하드웨어 선택의 폭이 넓습니다.
시각화, 시뮬레이션, 통신, 디버깅 등 로봇 관련 SW 들을 일일이 구현하는데 엄청난 시간과 노력이 필요한 만큼,
로봇 소프트웨어 개발을 보다 효율적으로 할 수 있도록
대기업을 포함한 스타트업, 연구기관 등 ROS 2 프레임워크 도입 적극적으로 진행 중입니다.
POINT 2
물류 자동화, 서빙, 배송 등 자율주행 핵심 기술 구현을 위한
SLAM & Navigation 개발 학습
오픈소스 기반의 SLAM 알고리즘과 Navigation 프레임워크 개념을 통해 자율주행 핵심 기능을 사전에 검토하고
다양한 상황에서 자율주행 개발 전략 구상을 할 수 있는 방법들을 함께 학습합니다.
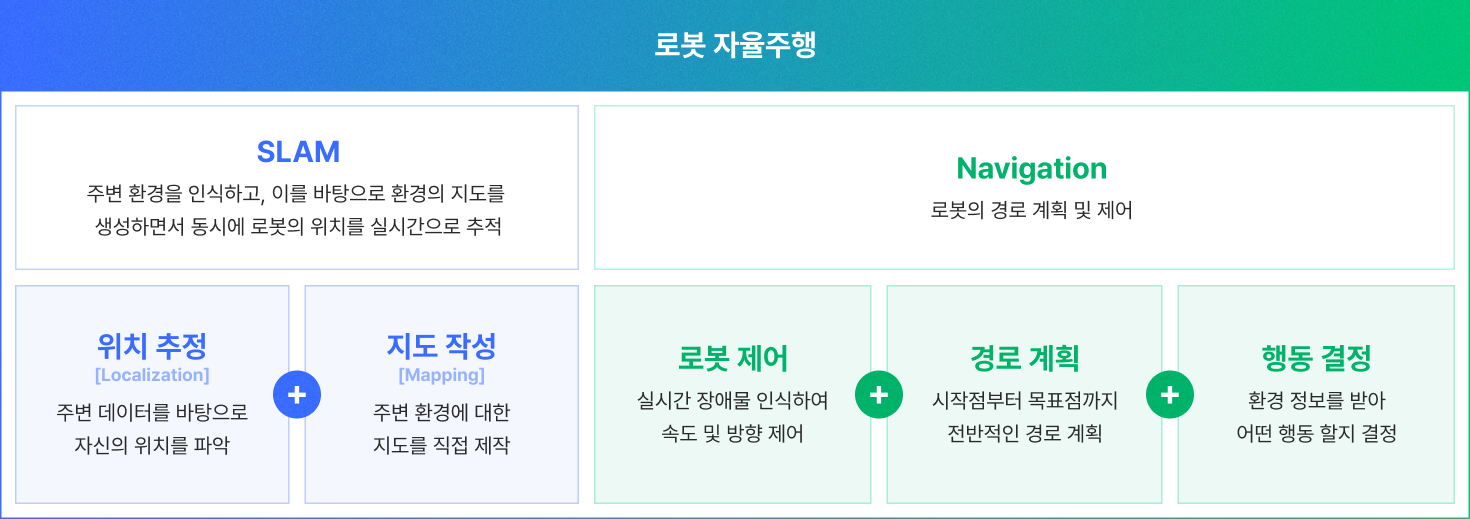
로봇 자율주행의 핵심 기술 SLAM과 ROS 2의 꽃이라 할 수 있는 Navigation
핵심 개념과 활용 방법을 한 번에 학습!
SLAM
01. Mapping
Mapping 개요
(실습) Cartographer SLAM
(실습) 작성한 지도 저장하기
작성한 지도 수정 전략 및 다른 프로세스에서의 활용방법
Nav2 Lifecycle Manager
(실습) Lifecycle Manager 서비스 테스트
02. Localization
Localization 개요
(실습) AMCL (Adaptive Monte Carlo Localization)
03. SLAM 심화&적용
(실습) SLAM 파라미터 튜닝 전략
(실습) AMCL 기반의 로봇 초기 위치 추정 전략
(실습) Global Localization 전략
SLAM을 위한 센서 그리고 활용 전략
(실습) RGB-D Visual SLAM
SLAM에서의 Ground Truth
Navigation

01. Path Planning
Nav2 & Path Planning 개요
(실습) Nav2를 활용한 Path Planning 방법들

02. Planner, Controller, Smoother
(실습) Planner 파라미터 튜닝
(실습) Controller 파라미터 튜닝
(실습) Smoother Server 파라미터 튜닝
(실습) Behavior Server 파라미터 튜닝
(실습) BT Navigator 파라미터 튜닝

03. 장애물 회피 & Costmap
Costmap 개요
(실습) Global Costmap, Local Costmap 그리고 Layer
(실습) Costmap 파라미터 튜닝
POINT 3
시뮬레이터를 활용한 로봇 자율주행
실습 프로젝트
시뮬레이터를 활용하여
모바일 로봇의 자율주행을
위한 작동 과정을 실시간으로
확인해보면서
실무와 연구
분야에 바로 적용할 수 있는
자율주행 시스템 개발 실습을
직접 진행해봅니다..

Behavior tree (BT)
· Behavior Tree 개요
· (실습) BT 이해를 위한 간단한 프로그래밍
· (실습) Nav2와 연동하여 BT 사용하기

멀티로봇 시스템
· 멀티 로봇 시스템 이해를 위한 namespace 개요
· (실습) TF 공유 유무에 따른 멀티 로봇 시스템

속도 제한 및 접근 제한 구역 등 실제 로봇이 자율주행 중에 생길 수 있는 특수 상황에 대한
시나리오상 문제를 만들어 시뮬레이션 환경에서 직접 해결해봅니다.
01 | Navigation 2 프로그래밍 실습 프로젝트
AMR과 물류 창고 시뮬레이션 환경 구성
물류창고에서 로봇 자재 운송, 픽업 및 배달 등의 작업에 활용됩니다.
Navigation 2 패키지를 사용하여 AMR과 물류창고 시뮬레이션 환경을 구성해봅니다.
WayPoint 경유 & Navigate Pose
여러 웨이포인트를 설정하여 로봇이 경유지마다 정확하게 멈추고 다시 주행하도록
구현하며 장애물 회피 및 실시간 경로 수정 기능을 이해하고 설정해봅니다.
02 | 특수한 상황을 위한 유용한 기능을 적용한 실습 프로젝트

Keepout Filter 활용 (접근 금지 구역)
접근 금지 구역을 지정하고, 로봇이 해당 구역을 피하면서
주어진 목표 지점에 도달하도록 경로를 설정하는 연습을 진행할 수 있습니다.
이 과정에서 필터 설정 방법과 로봇이 어떻게 반응하는지를 관찰해봅니다.

Speed Filter 활용 (속도 제한 구역)
속도 제한 구역을 설정한 후, 로봇이 해당 구역을 지나갈 때 속도가 어떻게 변화하는지를
확인하며 실습을 진행합니다. 로봇이 구역에 진입하고 속도가 줄어드는 과정과,
구역을 벗어난 후 속도가 회복되는 상황을 테스트합니다.
Benefit
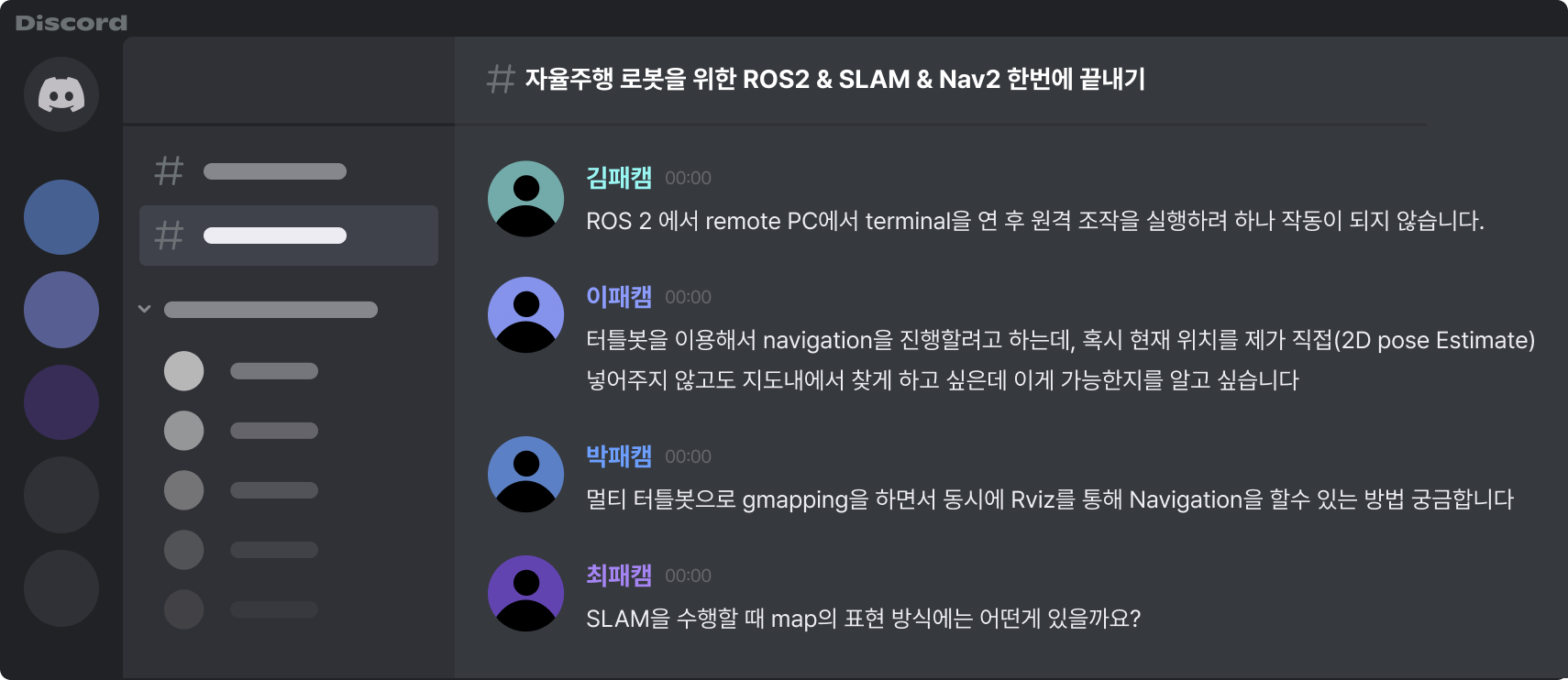
전문가에게 직접 물어볼 수 있는 기회!
패스트캠퍼스 수강생만 입장 가능한 온라인 라운지
온라인 라운지에 질문을 남겨 주시면, 강사님이 답변을 달아 드립니다.
강의 수강 중 궁금한 점이 생기면, 언제든지 질문하세요.
※ 2024년 12월 2일 ~ 2026년 12월 1일까지 ※
※
온라인 수강생 전용 디스코드 Q&A 채널이 운영되며 채널 링크는 별도 안내됩니다.
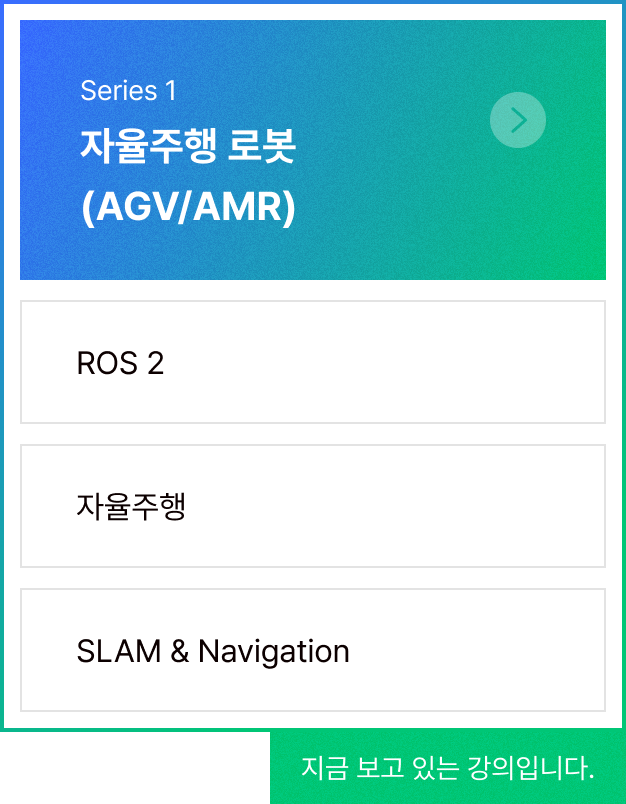
차근차근 배워 나가는 로보틱스 시리즈
로봇 아카데미 코스 로드맵
로보틱스 시리즈 미리보기
로보틱스 시리즈는 로봇 분야 취업을 희망하는 분들과 연구원,
실무 엔지니어 등을 위한 난이도/주제별 체계적인 로드맵 제공할 예정입니다.


이 코스 수강을 이미 마쳤다면?
이 강의를 완강한 수강생 분들이 많이 수강한 로보틱스 아카데미의 다른 강의를 추천해요.

패키지 상품
판매 기간이 종료된 상품입니다.

총 2과목
 ROS 2 & AI 로 끝내는 로봇 개발 올인원정가 1,200,000원
ROS 2 & AI 로 끝내는 로봇 개발 올인원정가 1,200,000원 자율주행 로봇을 위한 ROS 2 & SLAM & Nav2 한번에 끝내기정가 1,000,000원
자율주행 로봇을 위한 ROS 2 & SLAM & Nav2 한번에 끝내기정가 1,000,000원
ROS 2 부터 SLAM & Navigation2까지 모두 학습한 후,
시뮬레이터를 활용한 실무 프로젝트부터
ROS2 & AI 를 활용한 실물 로봇 구현까지 한 번에!
ROS2 & AI 를 활용한 실물 로봇 구현까지 한 번에!
가격2,200,000원
할인 판매가81% 할인399,000원
12개월 할부월 33,250원

총 2과목
- 자율주행 로봇을 위한 ROS 2 & SLAM & Nav2 한번에 끝내기정가 1,000,000원
 피지컬 AI 개발을 위한 VLA & 로봇 특화 LLM 한번에 끝내기정가 400,000원
피지컬 AI 개발을 위한 VLA & 로봇 특화 LLM 한번에 끝내기정가 400,000원
“차세대 로봇 AI 개발자를 위한 필수 커리큘럼.
피지컬 AI와 자율주행 로봇 기술을 한 번에 마스터하세요.”
피지컬 AI와 자율주행 로봇 기술을 한 번에 마스터하세요.”
가격1,400,000원
할인 판매가69% 할인425,000원
12개월 할부월 35,417원

Robby
(현) 글로벌 대기업 자율주행 S/W 엔지니어
(현) 기업 전문 교육기관 로보틱스 엔지니어링 강사
(전) 자율주행 국비교육 강사
(전) 로보틱스 스타트업 S/W 엔지니어 및 테크리드
주요 프로젝트
· 자율주행 기술 관련 특허 다수 출원 및 등록
· 다수 대규모 국가과제 수주 및 PM 수행
강연 활동
· 정부출연연구기관 대상 자율주행 특강 진행
· 대학교 및 대학원 대상 ROS 2 특강 다수 진행 (서울대학교, 건국대학교, 홍익대학교, 경기대학교 외 다수)
· 기업 및 대학원 대상 자율주행 로봇 세미나 및 자문 활동
· 프로그래밍 언어(C, C++, Python 등) 및 문제해결전략(알고리즘) 온라인 강의 진행
안녕하세요,
자기소개 부탁드립니다.
자기소개 부탁드립니다.
안녕하세요, 자율주행 S/W 엔지니어로 근무하고 있는 Robby입니다.
현재 회사에서는 다양한 환경에서의 자율주행 관련 연구 및 문제 해결을 담당하고 있으며, 대학,연구기관 등 다양한 곳에서 로보틱스에 대한 전문 지식과 기술을 알려주는 강의도 함께 하고 있습니다.
저도 처음 공부할 때 “어떤 우선순위로 공부해야 하지?”, 그리고 현재 “이런 것들을 미리 누가 알려줬으면 좋았을 텐데”라는 생각을 정말 많이 했었기 때문에, 저는 로보틱스 엔지니어로서 현업에서 쌓은 경험을 바탕으로, 여러분께 실질적인 노하우를 제공하고자 합니다.
단순히 이론을 전달하는 데 그치지 않고, 실제 현업에서 겪었던 문제들을 해결한 경험을 토대로 강의자료가 구성되어 있습니다. 또한 최신 기술 동향을 반영한 실습과 프로젝트를 통해, 수강생들이 현업에서 바로 적용할 수 있는 역량을 갖출 수 있도록 돕겠습니다.
현재 회사에서는 다양한 환경에서의 자율주행 관련 연구 및 문제 해결을 담당하고 있으며, 대학,연구기관 등 다양한 곳에서 로보틱스에 대한 전문 지식과 기술을 알려주는 강의도 함께 하고 있습니다.
저도 처음 공부할 때 “어떤 우선순위로 공부해야 하지?”, 그리고 현재 “이런 것들을 미리 누가 알려줬으면 좋았을 텐데”라는 생각을 정말 많이 했었기 때문에, 저는 로보틱스 엔지니어로서 현업에서 쌓은 경험을 바탕으로, 여러분께 실질적인 노하우를 제공하고자 합니다.
단순히 이론을 전달하는 데 그치지 않고, 실제 현업에서 겪었던 문제들을 해결한 경험을 토대로 강의자료가 구성되어 있습니다. 또한 최신 기술 동향을 반영한 실습과 프로젝트를 통해, 수강생들이 현업에서 바로 적용할 수 있는 역량을 갖출 수 있도록 돕겠습니다.
수강을 망설이는 분들께
마지막으로 한 마디 부탁드립니다.
마지막으로 한 마디 부탁드립니다.
로봇 분야에 관심을 가지고 계신 많은 분들이 '로봇 개발자에 한번 도전해볼까?'‘기초가 없는 상태에서 관련 기술과 프로그래밍을 이해하고 내가 실무 프로젝트를 잘할 수 있을까?’ 라는 고민을 많이 하실텐데요.
다양한 이유로 “로봇 개발자를 해볼까?”라는 생각을 하시는 분들이 많을 거라 생각합니다. 하지만 저 역시도 마찬가지였고 로봇의 세계에 처음 입문하시는 분들, 그리고 비전공자분들은 “엄청난 두께의 제어이론, 로봇공학, 로봇 SW 관련 서적들”을 보고 지레 겁을 먹어 도전하기 무서워합니다.
하지만 로봇 SW 개발자 관점에서는 처음부터 저 많은 양의 내용을 완벽히 이해하고 모든 것을 습득할 필요까지는 없습니다. 따라서 ROS 2, SLAM, Navigation을 하나의 강좌로 통합하여 자율주행 로봇 개발에 필요한 핵심 요소들을 짧은 시간 내에 종합적으로 학습할 수 있도록 구성했습니다.
다양한 이유로 “로봇 개발자를 해볼까?”라는 생각을 하시는 분들이 많을 거라 생각합니다. 하지만 저 역시도 마찬가지였고 로봇의 세계에 처음 입문하시는 분들, 그리고 비전공자분들은 “엄청난 두께의 제어이론, 로봇공학, 로봇 SW 관련 서적들”을 보고 지레 겁을 먹어 도전하기 무서워합니다.
하지만 로봇 SW 개발자 관점에서는 처음부터 저 많은 양의 내용을 완벽히 이해하고 모든 것을 습득할 필요까지는 없습니다. 따라서 ROS 2, SLAM, Navigation을 하나의 강좌로 통합하여 자율주행 로봇 개발에 필요한 핵심 요소들을 짧은 시간 내에 종합적으로 학습할 수 있도록 구성했습니다.
추천 수강 대상
![]() 로봇 & 자율주행 시스템 및 개발에 대한 핵심 기술과 개념을 습득하여 실무에서 활용해보고 싶으신 분
로봇 & 자율주행 시스템 및 개발에 대한 핵심 기술과 개념을 습득하여 실무에서 활용해보고 싶으신 분
![]() 로보틱스 및 자율주행 업계 입문하시거나 취업,이직,직무 전환 등을 희망하시는 분
로보틱스 및 자율주행 업계 입문하시거나 취업,이직,직무 전환 등을 희망하시는 분
![]() ROS 2 전환 과정에 어려움 겪는 로보틱스 기업 엔지니어
ROS 2 전환 과정에 어려움 겪는 로보틱스 기업 엔지니어
![]() 현업에서 실제 자율주행 로봇 시스템의 문제가 어떻게 발생하고, 해결하는지 알고 싶은 분
현업에서 실제 자율주행 로봇 시스템의 문제가 어떻게 발생하고, 해결하는지 알고 싶은 분
![]() 최신 Nav2 를 활용한 로봇제어, 경로 생성 등 알고리즘 개발을 직접 경험하고 싶으신 분
최신 Nav2 를 활용한 로봇제어, 경로 생성 등 알고리즘 개발을 직접 경험하고 싶으신 분
로봇개발 첫걸음, 자율주행 로봇
ROS 2 부터 SLAM & Navigation2까지 모두 학습한 후, 시뮬레이터를 활용한 실습 구현 프로젝트까지
Part 01. 로보틱스 엔지니어를 위한 초기 개발 환경 구성
Part 02. ROS 2: 로보틱스 엔지니어링 기초
Part 03. SLAM: 로봇이 주변 환경을 인식하고 위치를 추정하는 방법
Part 04. Navigation: 로봇의 경로 계획 그리고 장애물 회피
Part 05. 실무 적용을 위한 Nav2 심화 그리고 응용
자율주행 로봇을 위한 ROS2 & Nav2 한번에 끝내기
[특별 구성] ROS2 올인원 패키지
[특별 구성] 피지컬 AI & 자율주행 로봇 올인원 패키지 (VLA + LLM + ROS2 + SLAM + Nav2)